T1042D4RDB RevA Schematic: Detailed Block Diagram and Interfaces
需积分: 16 176 浏览量
更新于2024-07-14
收藏 475KB PDF 举报
T1042D4RDB_revA_SCH是一份详细的设计图纸,包含了T1042型号的系统架构和接口设计。这份文档的核心内容分为以下几个部分:
1. 版本控制:文档初始版本为V0.1,发布日期为2014年10月,标志着该设计的初次发布。版本控制强调了信息可能会随时间更新,可能存在变动。
2. 页描述:文档开始是页描述,接着是电路图目录,列出了各个部分在图纸上的位置和编号,便于读者快速定位。
3. 系统框图:展示了整个系统的整体结构,可能包括关键组件和模块之间的连接关系,有助于理解系统的功能布局。
4. 机械设计:这部分可能包含硬件的尺寸、外形、安装要求等信息,确保产品的物理实现与电气设计协调一致。
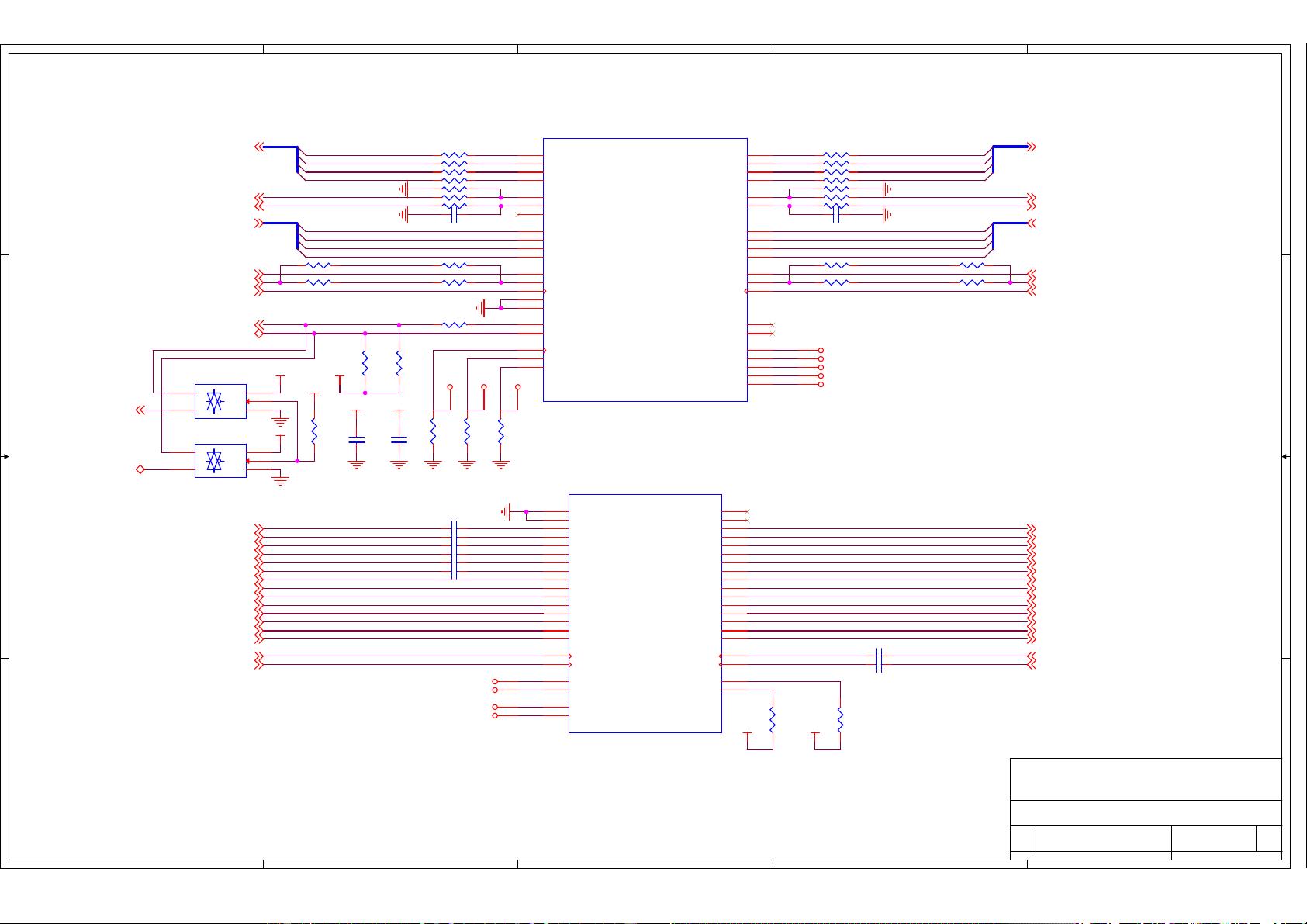
5. 内存接口:如T104XDDR4MEMORYINTERFACE,表明该设计支持DDR4内存,可能是系统的一个重要组成部分,负责数据的高速存储和传输。
6. 接口模块:包括T104XIFCINTERFACE、NOR/NAND FLASH接口、SPI Flash和SDHC接口等,展示出系统与其他外部设备的通信方式。
7. 系统逻辑接口:涉及处理器和其他核心部件间的交互,确保数据处理和控制流程的执行。
8. 网络接口:如T104XETHERNETandSERDESINTERFACE,可能涉及千兆以太网接口和串行通信接口,用于高速数据传输。
9. USB接口:确保系统兼容USB设备的连接,提供便捷的数据交换和电源供应。
10. 多路复用/解复用模块:T104XQE-TDM/DIUMUX/DEMUX,用于整合多个信号通道,提高信号处理效率。
11. 电源管理:包括T104XPOWERSUPPLY、PLL滤波器和接地设计,确保系统的稳定运行和电磁兼容性。
12. 串行通信接口:如UART和I2C,提供低速数据传输的通用接口。
13. RGMII和SGMII以太网端口:分别代表不同的高速以太网物理层接口标准。
14. PCIe、Mini PCIe和SATA接口:可能支持外设扩展或数据传输,增强系统的扩展性和兼容性。
15. CPLD:复杂可编程逻辑器件,可能用于实现特定的逻辑功能或配置。
16. 核心和系统电源转换器:确保不同模块所需的电压供应。
17. 电源开关、时钟发生器和多路切换:管理电源输入和信号路由,保持系统性能和稳定性。
18. 变更列表:记录了设计过程中的更改,提醒用户可能存在的更新或改动。
19. 版权和免责声明:所有信息未经通知可能会有所变化,不保证信息的准确性,且无任何类型的保修声明。
T1042D4RDB_revA_SCH是一份详尽的电子系统设计图纸,涵盖了从系统架构到接口细节的多个层面,为开发、测试和维护该产品提供了关键的技术参考。
1
1
2
2
3
3
4
4
5
5
A A
B B
C C
D D
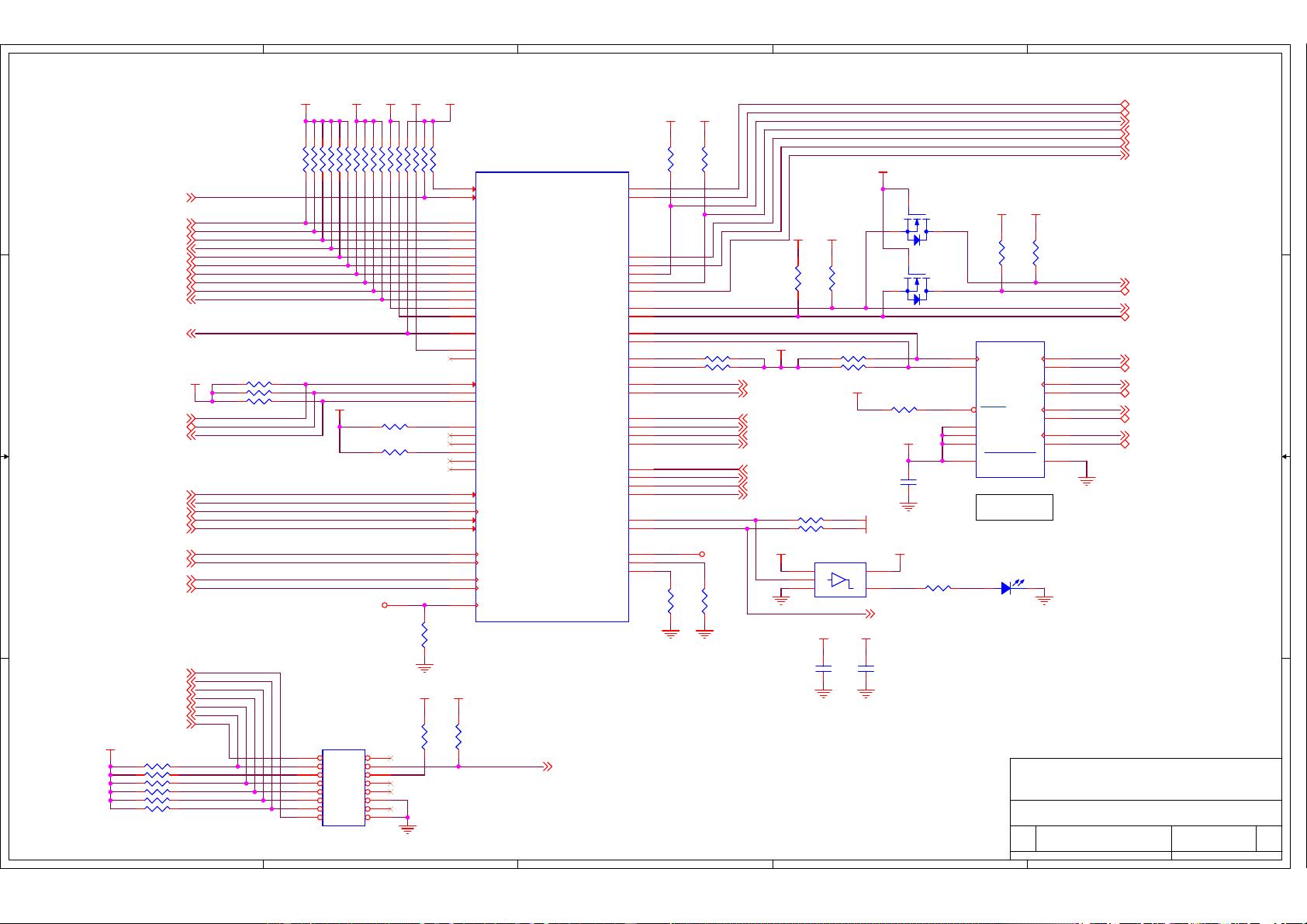
T104X SYSTEM LOGIC INTERFACE
I2C ADDR = 0x77
FOR T1040/T1042, PULL-DOWN
FOR T1020/T1022, PULL-UP
TEST_SEL_B
cfg_xvdd_sel
cfg_test_port_mux_sel
XVDD use 1.35V
LABEL = ASLEEP
COP CONNECTOR
ASLEEP
3V3
3V3 3V3
3V3
3V3
1V8_SLP
1V8_SLP 2V5_SLP 1V83V3
1V8_SLP 3V3_SLP
1V8_SLP
3V3_SLP
3V3_SLP 3V3_SLP
1V8_SLP 3V3_SLP
1V8
1V8_SLP
1V8_SLP 1V8_SLP
3V3
3V3_SLP 3V3_SLP
3V3
UART1_TXD 14
UART1_RXD 14
UART1_CTS_N 14
UART1_RTS_N 14
UART2_RXD 14
UART2_TXD 14
UART2_RTS_N 14
UART2_CTS_N 14
TEMP_DIODE_P 14
TEMP_DIODE_N 14
SYS_REFCLK30
DDR_REFCLK30
PORESET_N29
RESET_REQ_N29
CPLD_INT1_N29
COP_TRST_N 29
TEST_SEL_N29
SYS_REFCLK_P31
SYS_REFCLK_N31
JTAG_TRST_N29
HRESET_N29
EVT_PWR_EN 29
EVT_PWR_OK 29
GPIO_CKE_ISO29
EVT_BRD_ISO29
SDHC_VS29
EC1_INT_N19
EC1_PME_N19
CPLD_INT2_N29
I2C2_PEX_SCL 27
I2C2_PEX_SDA 27
I2C2_HDMI_SDA 16
I2C2_HDMI_SCL 16
I2C2_MPEX2_SDA 27
I2C2_MPEX2_SCL 27
I2C2_MPEX1_SDA 27
I2C2_MPEX1_SCL 27
COP_TDO29
COP_TDI29
COP_TCK29
COP_TMS29
COP_SRESET_N29
COP_HRESET_N29
COP_CKSTP_OUT_N29
JTAG_TDI29
JTAG_TDO29
JTAG_TCK29
JTAG_TMS29
RTC_INT_N14
EC2_INT_N20
EC2_PME_N20
I2C1_SCL_SLP 3,14,31,32
I2C1_SDA_SLP 3,14,31,32
I2C1_SDA 14,16,17
I2C1_SCL 14,16,17
CKSTP_OUT_N 29
DIU_HSYNC 11
DIU_VSYNC 11
EVT0_N 29
EVT1_N 29
EVT4_N 29
SG_INT_N21
Title
Size Document Number Rev
Date: Sheet
of
Design Engineer
<Doc> A
T104XRDB
B
738Monday, December 22, 2014
MICETEK
Title
Size Document Number Rev
Date: Sheet
of
Design Engineer
<Doc> A
T104XRDB
B
738Monday, December 22, 2014
MICETEK
Title
Size Document Number Rev
Date: Sheet
of
Design Engineer
<Doc> A
T104XRDB
B
738Monday, December 22, 2014
MICETEK
R82 4.7K
R98
4.7K
R86 4.7K
Q2
IRLML6346
1
2 3
R102 4.7K
R99
4.7K
C50
0.1uF
R115
10K
R116
10
R89 4.7K
R107 4.7K
TP1
R120 10K
U12
PCA9546APW
A0
1
A1
2
RESET
3
SD0
4
SC0
5
SD1
6
SC1
7
VSS
8
SD2
9
SC2
10
SD3
11
SC3
12
A2
13
SCL
14
SDA
15
VDD
16
R80 4.7K
(T2081 only)
System Logic
6 of 15
U1F
T1040
TMP_DETECT_B
F19
TMS
B18
ASLEEP
B2
CLK_OUT
E6
CKSTP_OUT_B
F18
DMA2_DREQ0_B
V5
DMA1_DDONE0_B
R5
DMA1_DREQ0_B
P5
DMA2_DACK0_B
AA5
DMA2_DDONE0_B
Y5
DMA1_DACK0_B
U5
RESET_REQ_B
B3
HRESET_B
E8
TRST_B
D19
TDI
A18
IRQ00
F7
IRQ01
D3
SYSCLK
G15
PORESET_B
F13
IRQ02
E9
TCK
E18
IRQ03
D1
IRQ04
D4
IRQ05
D5
TDO
C18
TEST_SEL_B
G8
SCAN_MODE_B
F9
RTC
B17
IRQ_OUT_B
A3
FA_ANALOG_PIN
B20
EVT0_B
D6
EVT1_B
C4
EVT2_B
C1
EVT3_B
C2
FA_ANALOG_G_V
C20
EVT4_B
C3
UART1_RTS_B
Y1
UART2_RTS_B
V4
UART1_CTS_B
Y2
UART2_CTS_B
Y4
UART1_SIN
AA1
UART2_SOUT
AA4
UART2_SIN
W4
UART1_SOUT
AA2
IIC1_SCL
W1
IIC1_SDA
V1
IIC2_SCL
V3
IIC2_SDA
Y3
DDRCLK
J21
IRQ06
AB4
IRQ07
AD5
IRQ08
AB1
IRQ09
AC5
IRQ10
L4
IRQ11
U3
IIC3_SCL
V2
IIC3_SDA
W3
IIC4_SCL
AA3
IIC4_SDA
AB3
DIFF_SYSCLK
G14
DIFF_SYSCLK_B
F14
TD1_ANODE
E21
TD1_CATHODE
G21
LP_TMP_DETECT_B
R6
R94
4.7K
R119 10K
R100 4.7K
TP2
R83 4.7K
R110 4.7K
R84 4.7K
R109 4.7K
R111 4.7K
R113
698
1%
R78 4.7K
C49
0.1uF
R95
4.7K
R88 4.7K
R93 1K
R92 1K
D1
GRN
12
R122 10K
R81 4.7K
R101 4.7K
C48
0.1uF
R103 4.7K
R114
698
1%
R79 4.7K
R123 10K
R85 4.7K
R90 4.7K
R106 4.7K
R104 4.7K
J4
HTST-108-01-L-DV
1 2
3 4
5 6
7 8
9 10
11 12
13 14
1615
R87 4.7K
R108 4.7K
Q3
IRLML6346
1
2 3
U13
FXLP34P5X
VCC1
1
A
2
GND
3
O
4
VCC
5
R105 4.7K
R112 510
R96
4.7K
R91 4.7K
R121 10K
R117
10K
R118 10K
R97
4.7K
剩余37页未读,继续阅读
2019-09-15 上传
2021-04-01 上传
2023-07-15 上传
2021-08-11 上传
2022-06-23 上传
2022-09-20 上传
2022-06-23 上传
2022-06-23 上传

ppcust
- 粉丝: 38
- 资源: 730
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
