第八届全国大学生飞思卡尔智能汽车竞赛规则详解
需积分: 10 192 浏览量
更新于2024-09-12
收藏 1.93MB PDF 举报
"第八届全国大学生‘飞思卡尔’杯智能汽车竞赛的竞速比赛规则与赛场纪律,参赛队伍需使用指定的飞思卡尔微控制器为核心,设计智能车系统,并在指定日期地点进行比赛。比赛成绩由赛车完成赛道的时间决定。大赛分为电磁组、光电平衡组和摄像头组。电磁组使用四轮车模通过磁场检测路径,摄像头组通过图像或反射点检测,平衡组则使用两轮车模保持直立行走。比赛器材如电机、舵机等由指定供应商提供,车模运行方式各有规定,如电磁组车模转向轮在前,动力轮在后,摄像头组反之,光电平衡组车模需直立行走。"
在这场智能汽车竞赛中,参赛者面临着多重挑战和要求。首先,他们必须基于飞思卡尔的特定型号微控制器(8位、16位或32位)进行创新设计,涵盖从传感器信号处理到电机和舵机控制,再到控制算法软件的开发。这要求团队具备扎实的嵌入式系统知识,包括硬件接口设计和高效软件编程能力。
比赛分为三个组别,每个组别对车模的路径检测方式有特定要求。电磁组利用赛道中央电线产生的磁场变化进行导航,对电子电路和电磁感应的理解至关重要。摄像头组通过图像处理技术,可能涉及机器视觉和图像识别算法。平衡组的两轮车模则需要实现动态平衡,这通常需要高级的控制理论,如PID控制和陀螺仪的运用。
此外,比赛对器材有严格的限制,指定的车模来自特定供应商,例如,电磁组的A型车模、摄像头组的B型车模以及光电平衡组的D型车模,都有明确的电机和舵机型号。这些规定旨在保证比赛的公平性,同时也对参赛者的工程实践能力和适应性提出了更高要求。
车模的运行规则也至关重要,比如电磁组的车模必须按照特定方向行驶,动力轮和转向轮的位置是固定的,而摄像头组的车模则反向运行,这增加了导航的复杂性。光电平衡组的车模则需要保持直立,对动态稳定性控制有极高的要求。
整个赛事不仅考验参赛队伍的技术创新能力,还强调了团队协作、项目管理和时间规划能力,因为所有队伍都需要在限定时间内完成智能车的制作和调试,并提交技术报告,以展示他们的设计理念和实现过程。全国总决赛的入围队伍还将面临更大的挑战,他们需要在更广泛的观众面前展示其成果,这不仅是一场技术的较量,也是一场综合素质的比拼。
3
动 力 轮
转 向 轮
车 模 运 行 方 向
动 力 轮
转 向 轮
车 模 运 行 方 向
图
2
摄车模运行模式
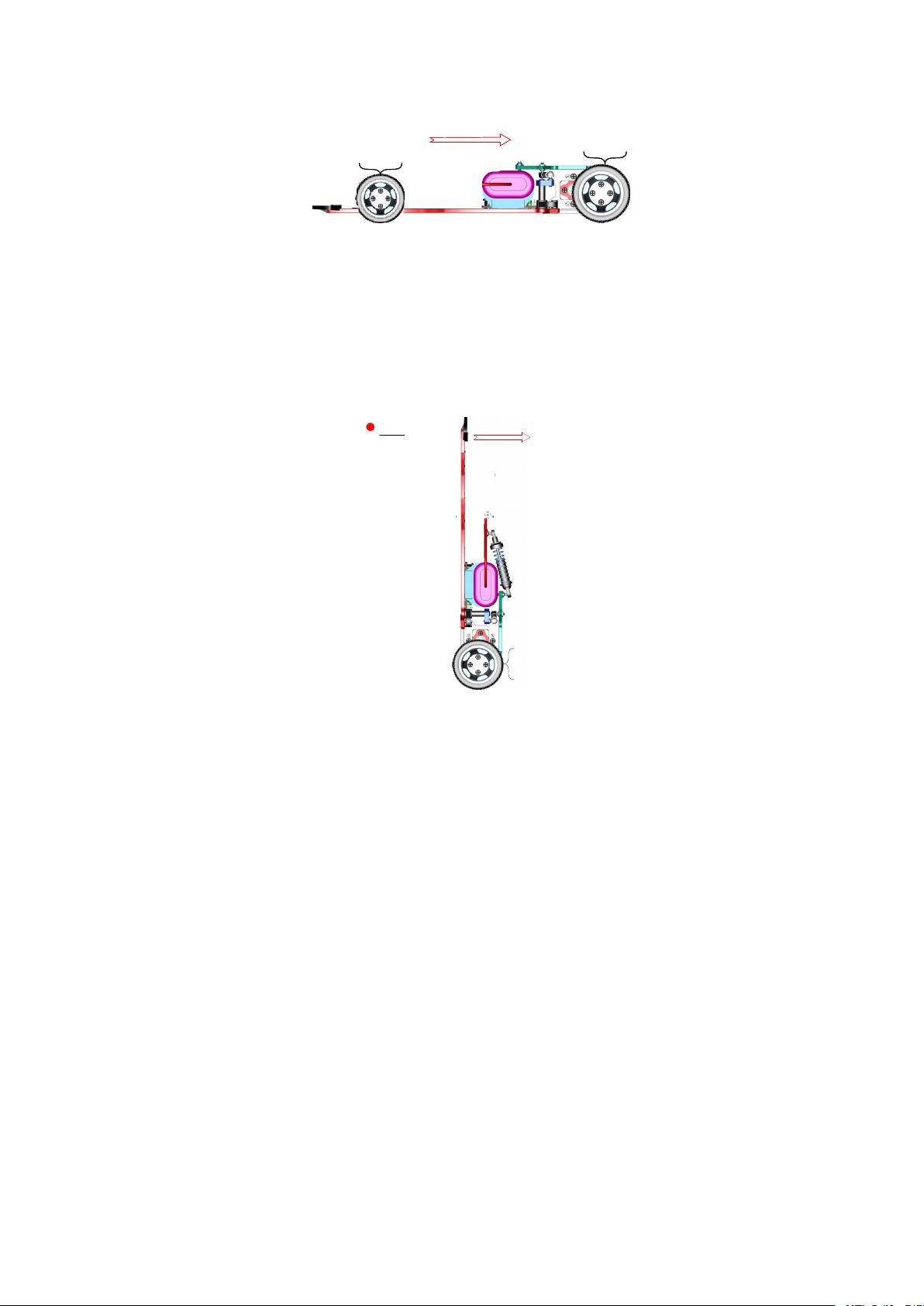
(3) 光电平衡组 :车模直立行走。
使用 D 型车模 。 车模运行时只允许动力轮着地 , 车模直立行走 。 车模运
行方向应按照图
3
所示:
C 车 模
动 力 轮
车 模 运 行 方 向
原 来 的 转 向
轮 没 有 用 ,
可 以 去 除 掉 。
注 意
车 模 请 按
照 图 示 的
方 向 运 行 。
图
3
光平衡组车模运行模式
� 细节及改动限制见附件一。
2. 须采用飞思卡尔半导体公司的 8 位 、 16 位 、 32 位处理器作为唯一的微控制器 。
�
有关细节及其它电子器件使用的限制见附件二;
3. 三个赛题组使用传感器限制:
� 参加电磁赛题组不允许使用光学传感器获得道路的光学信息,但是可以使
用光电码盘测量车速;
� 参加光电平衡组的车模可以使用光电传感器 、 指定型号的线性 CCD 传感器
进行道路检测,禁止使用激光传感器。
光电平衡组若采用线 性 CCD , 需使 用 Texas Advanced Optoelectronic Solutio n
公司的 TSL1401 系列的线性 CCD ,如下图所示:
剩余13页未读,继续阅读
117 浏览量
2011-11-24 上传
2012-11-08 上传
197 浏览量
2012-12-26 上传
2013-11-18 上传
137 浏览量

Trielminho
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vaporwave Wallpapers New Tab Theme-crx插件
- ioBroker.easee:easee是带有REST-API的壁盒。 ioBroker的此适配器可用于将壁盒连接到您的家庭环境
- 小魏月老交友盲盒v1.0.30
- 中型企业网交换与路由设计
- Marshmello Wallpapers New Tab Theme-crx插件
- gin_bbs:Gin BBS应用程序
- proj1:COMP180:proj1
- Java-project
- UEditor.rar
- Spark-studio:搜索和使用NASA媒体
- ffr-PWDFT:穷人密度泛函理论程序
- Halcon手机摄像头图像表面的轻微缺陷检测.rar
- Ionic 4 Cross Platform Android和IOS App入门
- 使用Python自动化现实世界的任务:最后一门课程,带有Python专业证书的Google IT自动化
- 易语言-仓库货位条码打印
- django-two-factor-auth:完整的Django双重身份验证,可轻松集成到大多数Django项目中
