精灵4 RTK仿地飞行教程:解决高差测区难题
需积分: 5 200 浏览量
更新于2024-08-05
收藏 10.29MB PDF 举报
"该教程介绍了精灵4 RTK无人机的仿地飞行功能,旨在帮助用户理解仿地飞行的概念、优缺点,并提供了仿地飞行的操作流程,包括使用Pix4DMapper和GlobalMapper软件进行航测数据处理的步骤。"
精灵4 RTK仿地飞行是一种特殊的航线规划方式,它能够根据测距地形自动调整飞行高度,确保地面分辨率的一致性,尤其适用于地形落差较大的区域。在这些地区,传统的飞行模式可能导致因重叠率不足而使得空三(空三解算,即空三匹配)出现空洞,影响测绘结果的完整性。仿地飞行的优点在于,它能确保在高差变化大的测区也能获得均匀的图像覆盖,提高测绘效率和数据质量。
然而,仿地飞行并非在所有情况下都是最佳选择。由于飞行器会随地形变化实时调整高度,当飞行至山脊背后时,可能因飞行高度降低而使遥控器与飞行器间的无线信号受阻,造成遥控器信号减弱甚至飞行器失联。因此,对于这类地形,建议将测区分成两部分,分别进行作业,以减少风险。
实现仿地飞行的作业操作流程通常包括以下步骤:
1. 首先,使用精灵4 RTK的“摄影测量2D”模式对测区进行初步作业,航高可适当设定得较高,以获取测区航片。
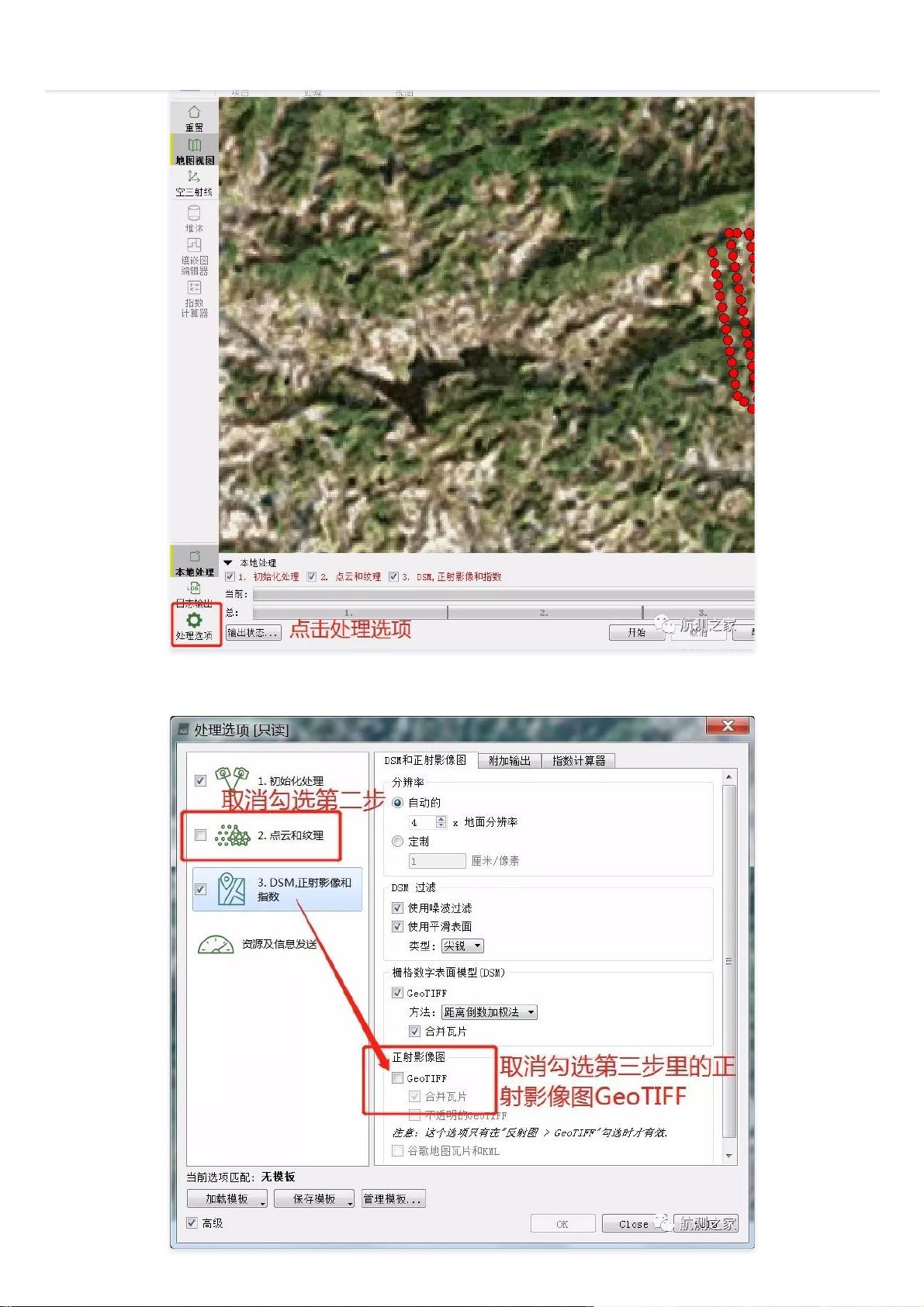
2. 接下来,利用Pix4DMapper软件对航片进行快速处理。选择“快速检测”下的“3DMaps-Rapid/LowRes”模板,然后取消“点云和纹理”及正摄影像图下的“GeoTIFF”选项,开始处理。
3. 完成处理后,可以使用GlobalMapper等软件进一步分析和编辑数据,以生成更精确的地形模型。
在执行仿地飞行任务时,安全始终是首要考虑因素。用户应充分了解仿地飞行的优缺点,结合测区实际情况,合理规划飞行路径,确保飞行器与遥控器之间的通信稳定,避免潜在的风险。同时,熟悉并熟练运用相关的软件工具,如Pix4DMapper和GlobalMapper,是成功执行仿地飞行任务的关键。通过这种方式,用户可以有效地提高测绘工作的精度和效率,满足各种复杂环境下的地理信息采集需求。
2020/3/20 精灵4 RTK仿地飞行教程 - 云+社区 - 腾讯云
https://cloud.tencent.com/developer/news/469731 3/12
把第二步“2.点云和纹理”的勾取消掉。接着选择第三步,将正摄影像图下的“GeoTIFF”的勾取消掉。设置完成后,
回到主界面点击开始按钮处理。
分享
剩余11页未读,继续阅读
1057 浏览量
点击了解资源详情
点击了解资源详情
2021-11-18 上传
477 浏览量
151 浏览量
2026 浏览量
2021-02-16 上传

hellogiser2020
- 粉丝: 15
- 资源: 67
 我的内容管理
展开
我的内容管理
展开







最新资源
- 嵌入式系统综述 pdf文件 讲解了软件和硬件,以及开发
- VLAN在校园网中的应用方案设计
- C++设计模式.pdf (C++ 详细描述经典设计模式)
- 计算机一级网上测试系统
- 搭建SVN使用说明及原理说明
- VC编程资料\网络编程实用教程_相关章节实例源程序清单.doc
- sqlsever 2005 操作数据库
- redhat linux手册
- Office SharePoint Server 2007 Install Guide.pdf
- asp.net,php等web开发教程
- Keil C51 vs 标准C
- 挑战SOC-基于NIOS的SOPC设计于实践
- VC++ 6.0 - Advanced MFC Programming
- C++风格的C经典程序
- PLL锁相环的ADS仿真
- delphi6database编程
