在线语义3D场景分割的融合感知点卷积方法
需积分: 46 77 浏览量
更新于2024-08-26
收藏 2.06MB PDF 举报
"Fusion-Aware Point Convolution for Online Semantic 3D Scene Segmentation"
这篇论文主要探讨了在线语义3D场景分割与实时RGB-D重建过程中所面临的特殊挑战,并提出了一种新颖的融合感知3D点卷积方法,旨在直接在逐步融合的3D几何数据上进行操作,同时智能地融合帧间信息,以实现高质量的3D特征学习。
在线语义3D分割在实时RGB-D重建中的核心问题是如何直接对正在构建的3D几何数据执行3D卷积,以及如何有效地帧间信息融合。作者们提出的解决方案是融合感知3D点卷积,它利用一种专有的动态数据结构来组织在线获取的点云数据。
全局层面,他们采用增量生长的坐标区间树来编译在线重建的3D点,这使得快速插入点和查询邻居成为可能。局部层面,每个点的邻域信息通过一棵八叉树来维护,其构建得益于全局树的快速查询功能。这两层的数据结构设计确保了对3D点云的有效处理和特征提取。
3D点卷积是深度学习在3D场景理解中的关键操作,传统方法往往在离线环境下处理静态数据。然而,在实时环境中,数据是连续流入的,因此需要一种能够适应这种流式数据并能逐步更新模型的方法。论文中的融合感知点卷积就是为了解决这个问题,它能够在数据融合的同时学习到更丰富的特征。
此外,通过利用帧间的相关性,该方法可以减少计算复杂性,提高处理速度,这对于实时应用至关重要。这种智能的信息融合策略有助于捕捉3D场景的动态变化,从而提高在线语义分割的准确性和鲁棒性。
这篇论文提出了一个创新的解决方案,将3D点云处理和实时信息融合相结合,为实时3D语义分割提供了一个强大的工具。这一技术对于自动驾驶、机器人导航、增强现实等领域具有广泛的应用潜力。通过结合全局和局部的视角,以及动态数据结构的运用,研究者能够实现高效且准确的3D场景理解和分割。
Fusion-Aware Point Convolution for Online Semantic 3D Scene Segmentation
Jiazhao Zhang
1,∗
Chenyang Zhu
1,
*
Lintao Zheng
1
Kai Xu
1,2†
1
National University of Defense Technology
2
SpeedBot Robotics Ltd.
Abstract
Online semantic 3D segmentation in company with real-
time RGB-D reconstruction poses special challenges such
as how to perform 3D convolution directly over the progres-
sively fused 3D geometric data, and how to smartly fuse in-
formation from frame to frame. We propose a novel fusion-
aware 3D point convolution which operates directly on the
geometric surface being reconstructed and exploits effec-
tively the inter-frame correlation for high quality 3D fea-
ture learning. This is enabled by a dedicated dynamic data
structure which organizes the online acquired point cloud
with global-local trees. Globally, we compile the online re-
constructed 3D points into an incrementally growing coor-
dinate interval tree, enabling fast point insertion and neigh-
borhood query. Locally, we maintain the neighborhood in-
formation for each point using an octree whose construction
benefits from the fast query of the global tree. Both levels
of trees update dynamically and help the 3D convolution ef-
fectively exploits the temporal coherence for effective infor-
mation fusion across RGB-D frames. Through evaluation
on public benchmark datasets, we show that our method
achieves the state-of-the-art accuracy of semantic segmen-
tation with online RGB-D fusion in 10 FPS.
1. Introduction
Semantic segmentation of 3D scenes is an fundamental task
in 3D vision. The recent state-of-the-art methods mostly
apply deep learning on either 3D geometric data solely [
25]
or the fusion of 2D and 3D data [
20]. These approaches,
however, are usually offline, working with an already re-
constructed 3D scene geometry [
5, 14]. Online scene un-
derstanding associated with real-time RGB-D reconstruc-
tion [
13, 22], on the other hand, is deemed to be more
appealing due to the potential applications in robot and
AR. Technically, online analysis can also fully exploit the
spatial-temporal information during RGB-D fusion.
For the task of semantic scene segmentation in company
with RGB-D fusion, deep-learning-based approaches com-
monly adopt the frame feature fusion paradigm. Such meth-
*
Joint first authors
†
Corresponding author: kevin.kai.xu@gmail.com
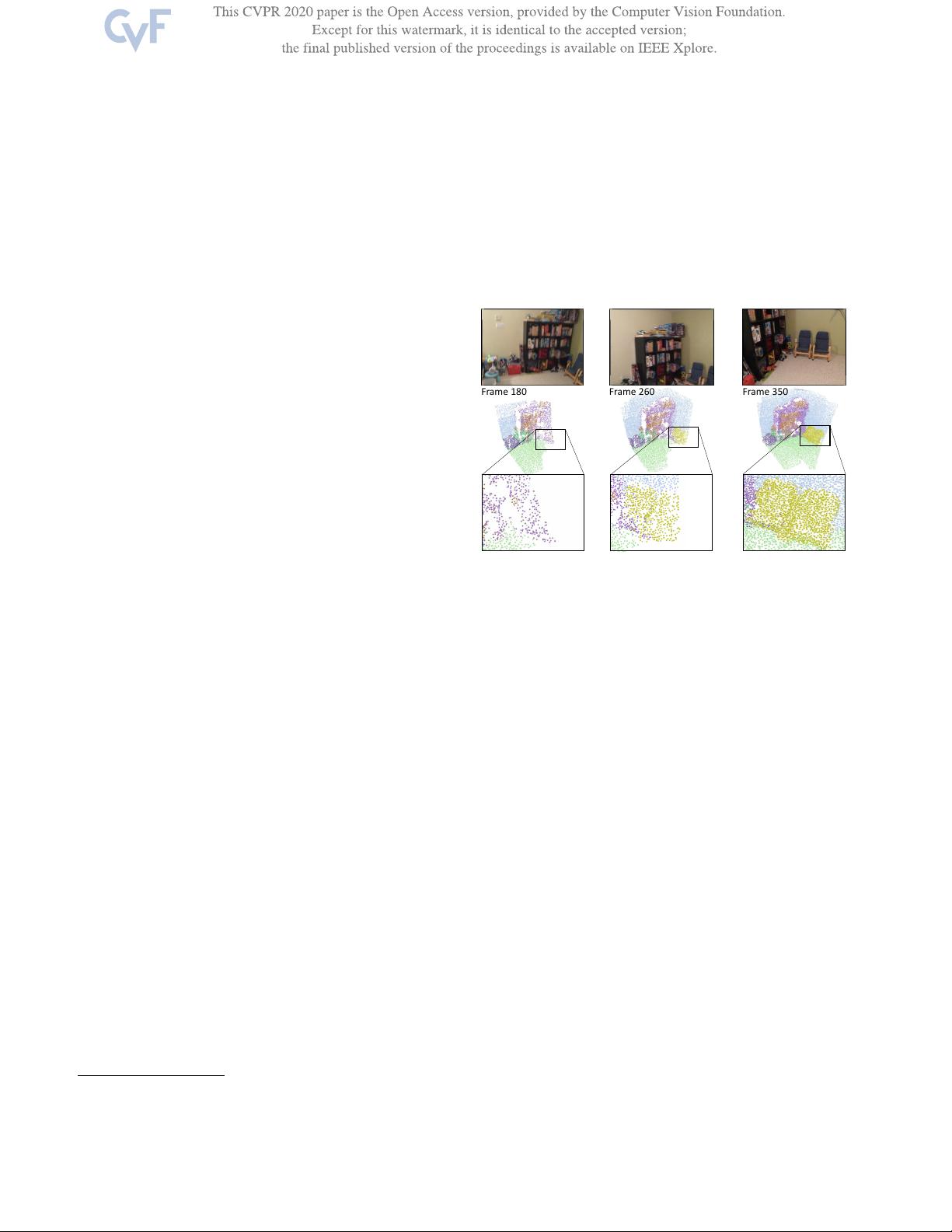
Frame 180
Frame 350Frame 260
Figure 1: We present fusion-aware 3D point convolution
which operates directly over the progressively acquired and
online reconstructed scene surface. We show the point-wise
labeling is being gradually improved (the chairs are recog-
nized) as more and more frames (first row) are fused in.
ods first perform 2D convolution in the individual RGB-D
frames and then fuse the extracted 2D features across con-
secutive frames. Previous works conduct such feature fu-
sion through either max-pooling operation [
14] or Bayesian
probability updating [
20]. We advocate the adoption of di-
rect convolution over 3D surfaces for frame feature fusion.
3D convolution on surfaces learns features of the intrinsic
structure of the geometric surfaces [
2] that cannot be well-
captured by view-based convolution and fusion. During on-
line RGB-D fusion, however, the scene geometry changes
progressively with the incremental scanning and reconstruc-
tion. It is difficult to perform 3D convolution directly over
the time-varying geometry. Besides, to attain a powerful
3D feature learning, special designs are needed to exploit
the temporal correlation between adjacent frames.
In this work, we argue that a fast and powerful 3D convo-
lution for online segmentation necessitates an efficient and
versatile in-memory organization of dynamic 3D geomet-
ric data. To this end, we propose a tree-based global-local
dynamic data structure to enable efficient data maintenance
and 3D convolution of time-varying geometry. Globally, we
organize the online fused 3D points with an incrementally
growing coordinate interval tree, which enables fast point
1
4534
下载后可阅读完整内容,剩余9页未读,立即下载
317 浏览量
点击了解资源详情
点击了解资源详情
2018-01-17 上传
2021-05-17 上传
点击了解资源详情
点击了解资源详情
122 浏览量
2025-03-06 上传

小码1号
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
