Apollo自动驾驶传感器标定指南:一站式服务与工具详解
需积分: 5 5 浏览量
更新于2024-07-04
收藏 6.21MB PDF 举报
"《Apollo传感器标定指南》是一份专注于自动驾驶技术领域的技术文档,主要讲解了如何准确地标定不同传感器之间的内在参数(Intrinsic Parameters)和外在参数(Extrinsic Parameters)。在自动驾驶系统中,激光雷达(LiDAR)与组合惯性测量单元(IMU)等传感器的配合至关重要,它们的数据融合对于高精度地图制作、激光点云定位及物体检测任务是不可或缺的。
该指南首先阐述了传感器标定的基本概念,即通过收集数据来确定每个传感器的内参,如相机的焦距、主点和畸变系数,以及不同传感器间的相对位置。它强调了Apollo平台提供的云端标定服务,这一服务使得开发者无需在本地或车辆上进行繁琐的标定过程,极大地提高了跨平台标定的便捷性和效率,降低了开发难度。
指南详细介绍了三种主要的标定工具:相机到相机标定(Camera-to-Camera Calibration)、相机到激光雷达标定(Camera-to-LiDAR Calibration)以及雷达到相机标定(Radar-to-Camera Calibration),针对IMU与车辆平台的标定也有所涉及。这些工具作为可执行程序集成在Apollo中,用户只需启动即可执行标定任务。
特别指出,对于Velodyne HDL-64的用户,依然可以选择使用Apollo的标定服务,而无需依赖特定的工具包。标定完成后,用户通常会得到以.yaml格式存储的结果,这方便后续的验证和应用。标定所需的相机内参可以从ROS Camera Calibration Tools和MATLAB的Camera Calibration Toolbox等外部工具获取。
为了便于使用,指南提供了具体的步骤指导,包括下载和安装标定工具,并将其放置在$APOLLO_HOME/modules/calibration目录下,确保所有必要的标定信息都在合适的位置。总结来说,这份指南为自动驾驶系统的传感器标定提供了一套完整且实用的解决方案,有助于提升整个系统的性能和可靠性。"
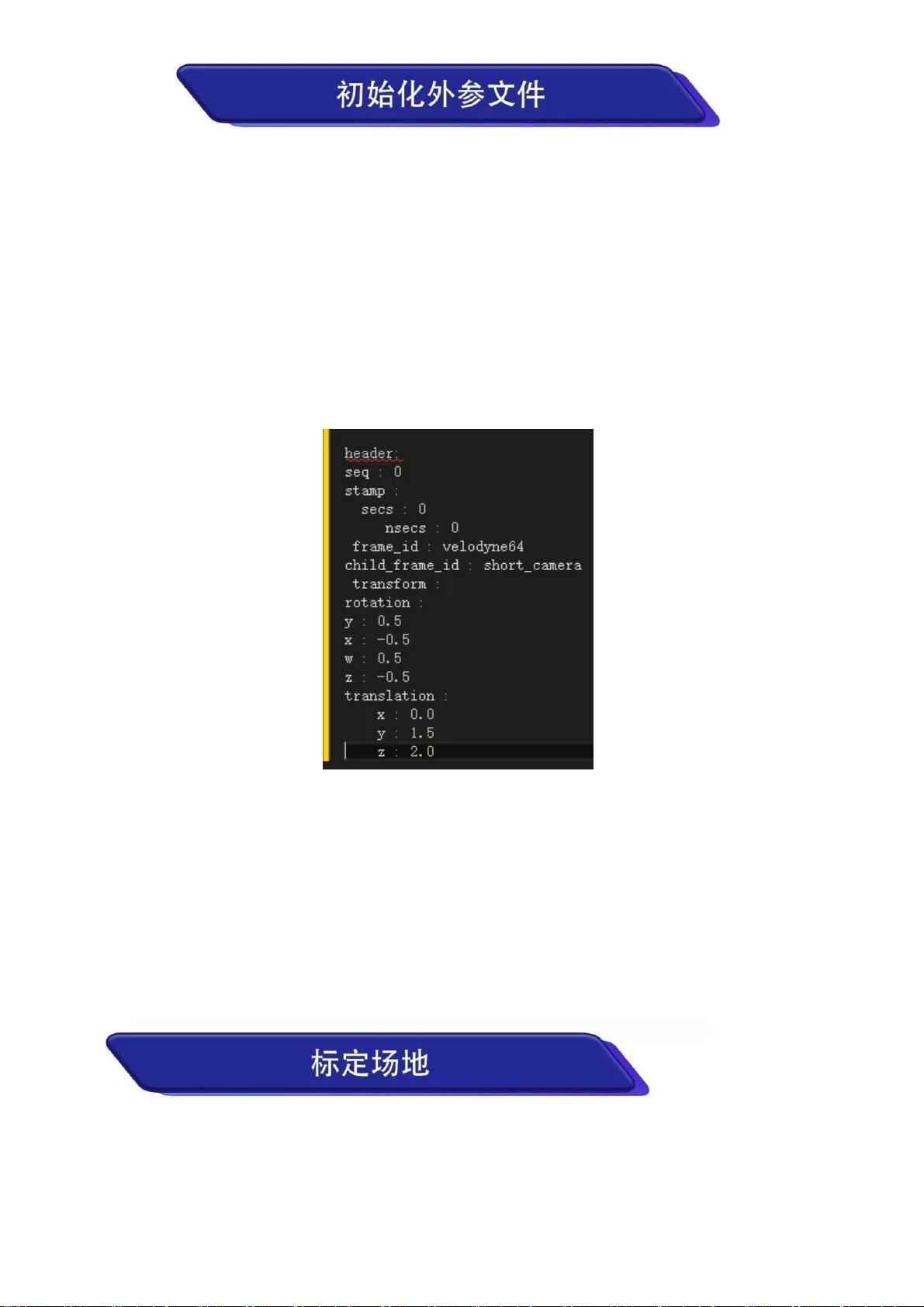
这些标定工具需要用户提供一个初始外参作为参考。
下面是Camera-to-LiDAR标定使用到的外部参数文件的一个样例。
文件中 translation 表示相机到激光雷达的平移矩阵, rotation 是采用四元组方法表示的
旋转矩阵。
注意:
Camera-to-LiDAR 标定成功与否和初始外参息息相关。
较大偏离的外参值很可能导致标定失败。因此,在条件允许下,提供最精确的初始外参就显得十
分重要。
因为Camera-to-LiDAR标定方法通常在自然环境中使用,一个好的地方能够极大的提高标定结果
的精度。
剩余16页未读,继续阅读
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2021-06-23 上传
2020-09-17 上传
2022-04-17 上传

疯狂的机器人
- 粉丝: 9178
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- 图布局算法综述(很详细的)
- ORACLE傻瓜手册v2.0
- 基于FPGA 的DDS 调频信号的研究与实现.pdf
- ON_EXTENSION_AND_IMPLEMENTATION_MECHANISM_FOR.pdf
- grails入门指南
- LinkedIn - A Professional Network built with Java Technologies and Agile Practices
- sql性能调整-总结
- 硬盘接口技术详解文档
- 黑客常用DOS命令大全
- Sybase IQ For AIX安装
- GTK+ 2.0教程(PDF中文) unix/linux界面编程必备
- ISO27001标准的英文原版。。
- TD使用手册,比较经典的使用手册,测试必学
- 超市进销存管理系统的开发
- Compiere开发环境配置
- TortoiseSVN中文版手册
