移动机器人自主定位:鲁棒扩展H∞滤波器设计与验证
19 浏览量
更新于2024-08-27
收藏 269KB PDF 举报
本文主要探讨了在移动机器人自主导航系统中应用鲁棒扩展H∞滤波器进行精确定位的技术。随着移动机器人技术的快速发展,精确的定位是实现自主导航和智能控制的关键因素之一。传统的卡尔曼滤波器虽然在某些情况下表现出色,但对于处理非线性运动学模型、非线性距离测量以及过程和测量噪声时,其性能可能会受到限制。
在本文中,研究者提出了一种新颖的解决方案,即开发了一种新型的鲁棒扩展H∞滤波器。H∞滤波器以其在处理不确定性和噪声方面的优异性能而闻名,通过引入H∞范数,它能够在保证滤波性能的同时,对系统中的不确定性有更强的抵抗力。这种滤波器设计考虑了移动机器人复杂的非线性运动特性,如非线性动力学模型和非线性传感器读数,这些都是传统滤波方法难以有效应对的挑战。
所提出的滤波器采用两步预测-校正结构,类似于经典的卡尔曼滤波器框架,但在此基础上进行了增强,以适应非线性系统的复杂性。这种设计允许滤波器在预测阶段估计未来状态,并在校正阶段利用实际测量值进行修正,从而提高了定位精度。这种方法的优势在于它能够在存在噪声和不确定性的情况下,提供更稳定的定位估计,这对于移动机器人在复杂环境下的导航至关重要。
为了验证该方法的有效性,作者进行了详尽的仿真分析。通过模拟不同条件下的移动机器人运动,研究了鲁棒扩展H∞滤波器在处理各种动态和静态误差,以及在不同噪声水平下的性能。结果显示,相比于传统的滤波器,该方法在保持定位精度的同时,具有更好的鲁棒性和抗干扰能力。
这篇论文为移动机器人领域的定位问题提供了一个创新的解决策略,特别是在处理非线性问题和噪声挑战方面。它展示了鲁棒扩展H∞滤波器在提高自主移动机器人定位精度和稳定性方面的潜力,为实际应用提供了理论基础和技术支持。对于从事机器人导航、人工智能和控制系统研究的工程师来说,这篇文章提供了深入理解并可能借鉴的关键技术信息。
vtðÞ~
v
R
tðÞzv
L
tðÞ
2
ð2Þ
v tðÞ~
v
R
tðÞ{v
L
tðÞ
d
ð3Þ
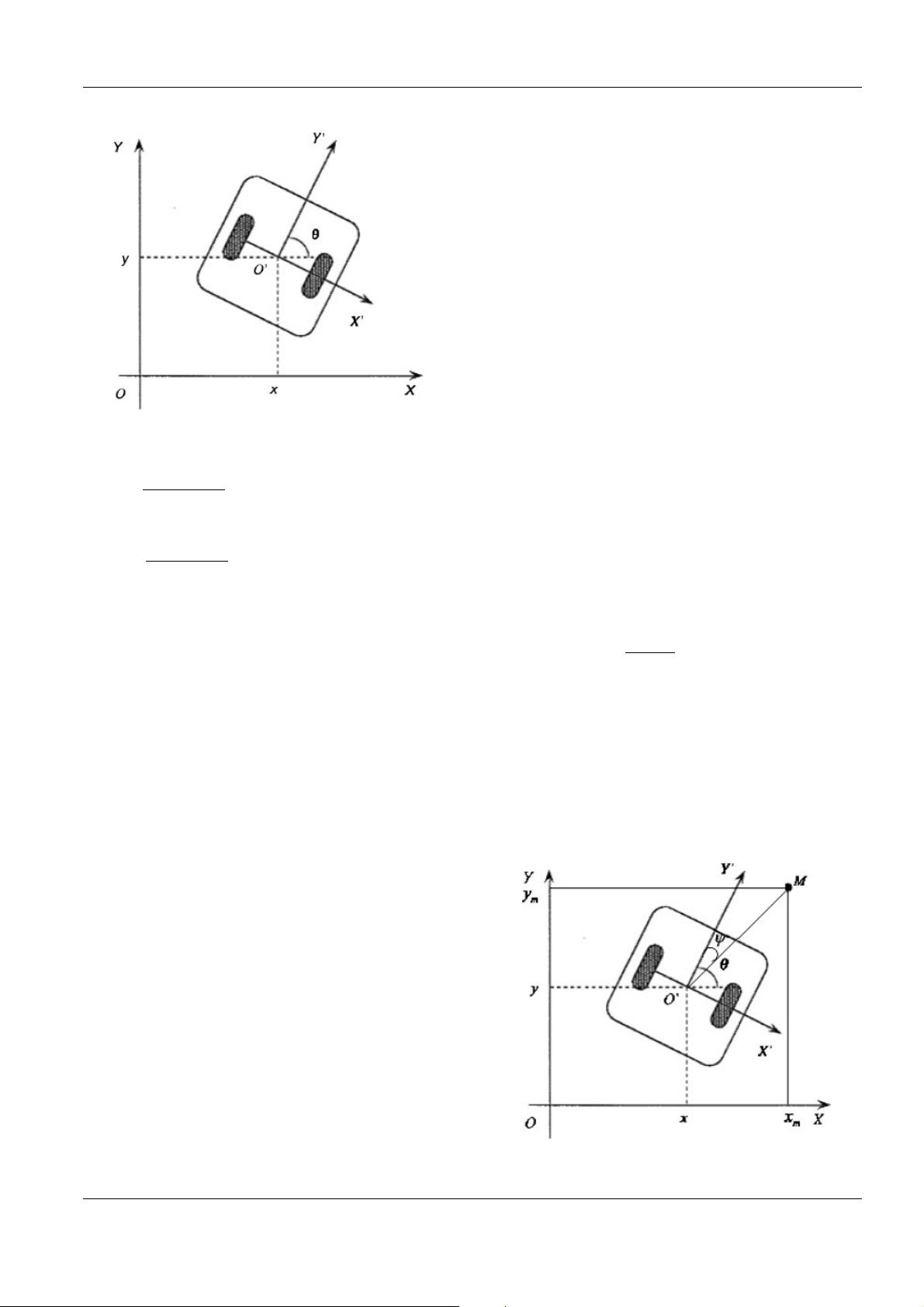
where x(t) and y(t) are the coordinates of the main
axis midpoint between the two driving wheels, h(t)is
the angle between the robot forward axis and the x-
direction, v(t) and v(t) are, respectively, the dis-
placement and angular velocities of the robot, v
R
(t)
and v
L
are, respectively, the right and left displace-
ment velocities of the robot, and d is the distance
between the two wheels of the robot. The encoders
placed on the driving wheels provide a measur e of
the incremental angles over a sampling period. The
odometric measures are used to obtain an estimate
of the displacement and angular velocities, respec-
tively, which are assumed to be constant over the
sampling period. If zero-order hold on v(t) and v(t)
is assu med, then the above system is discretized
with sample time and expressed in linear form as
x
k z1
~x
k
zDTv
k
cos h
k
y
k z1
~y
k
zDTv
k
sin h
k
h
kz1
~h
k
zDTv
k
8
>
<
>
:
ð4Þ
Let
z
k
~
x
k
y
k
h
k
2
6
4
3
7
5
ð5Þ
and
u
k
~
DTv
k
DTv
k
:~
u
1, k
u
2, k
ð6Þ
equation (4) can be rew ritten as
z
kz 1
~f z
k
, u
k
ðÞ ð7Þ
where
f z
k
, u
k
ðÞ~z
k
z
u
1, k
cos h
k
u
1, k
sin h
k
u
2, k
2
6
4
3
7
5
ð8Þ
The distance and angle to the marker M are
treated as the measurements (see Fig. 2). The
azimuth y with respect to the x-axis and the distance
from the robot’s planar Cartesian coordinates (x, y)
to the marker (x
M
, y
m
) at a time instant k can be
related to the current syst em state variables x
k
, y
k
,
and h
k
as follows
d
k
~
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
x
m
{x
k
ðÞ
2
z y
m
{y
k
ðÞ
2
q
ð9Þ
y
k
~h
k
{arctan
y
m
{y
k
x
m
{x
k
ð10Þ
Let
m
k
~
d
k
y
k
ð11Þ
equation (4) can be rew ritten as
m
k
~g z
k
ðÞ ð12Þ
Fig. 1 The mobile robot
Fig. 2 The coordinate frame for the mobile robot
Mobile robot localization using robust extended H
‘
filtering 1069
JSCE791 Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering
剩余13页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2013-10-22 上传
2019-07-22 上传
2021-05-24 上传
2023-04-03 上传
2023-05-21 上传
2012-09-03 上传

weixin_38536267
- 粉丝: 2
- 资源: 942
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
