TinyOS:资源受限传感器网络的操作系统
需积分: 9 180 浏览量
更新于2024-07-23
收藏 186KB PDF 举报
"TinyOS: An Operating System for Sensor Networks"
TinyOS是专为传感器网络设计的一种灵活、应用特定的操作系统。传感器网络由成千上万的微型低功耗节点组成,这些节点执行并发的、反应式的程序,必须在严格的内存和电源限制下运行。这种环境中的资源限制、事件为中心的并发应用以及低功耗操作需求构成了TinyOS设计的核心挑战。其解决方案在于采用灵活的细粒度组件与支持复杂而安全并发操作的执行模型相结合。
TinyOS成功地应对了这些挑战,已经成为全球超过一百个研究团队首选的传感器网络平台,支持各种各样的应用和研究课题。系统的设计允许它在非常低的内存需求下运行复杂的并发程序(许多应用程序可以在16KB的内存内运行,而核心OS仅需400字节),同时实现高效、低功耗的操作。通过TinyOS,研究者和开发者能够进行传感器网络创新和应用开发。
TinyOS的主要特点包括:
1. **灵活的组件化**:TinyOS采用模块化设计,每个组件都负责特定的功能,这使得系统可以根据具体应用需求进行定制,同时降低了代码复杂性。
2. **细粒度并发**:操作系统支持细粒度的并发执行,允许节点在有限的资源条件下同时处理多个事件,提高了响应速度和效率。
3. **安全的并发操作**:TinyOS提供了执行模型,确保在资源受限的环境中进行并发操作时的正确性和稳定性。
4. **低功耗优化**:TinyOS的架构考虑了能源效率,通过智能调度和管理策略,延长了传感器节点的电池寿命。
5. **广泛的应用支持**:TinyOS不仅被用于基础研究,还支持各种实际应用,如环境监测、智能家居、工业自动化等。
6. **活跃的社区**:由于其开源性质,TinyOS有一个活跃的开发者社区,持续改进和扩展其功能,推动了传感器网络技术的进步。
通过TinyOS的定量和定性评估,可以证明该系统能够在满足极低内存需求的同时,运行复杂的程序,并实现高效能和低功耗。这些特性使其成为传感器网络领域的关键性技术,为未来物联网(IoT)的发展奠定了基础。
TimerM
StdControl Timer
HWClock
module TimerM {
provides {
interface StdControl;
interface Timer[uint8_t id];
}
uses interface Clock;
}
implementation {
... a dialect of C ...
}
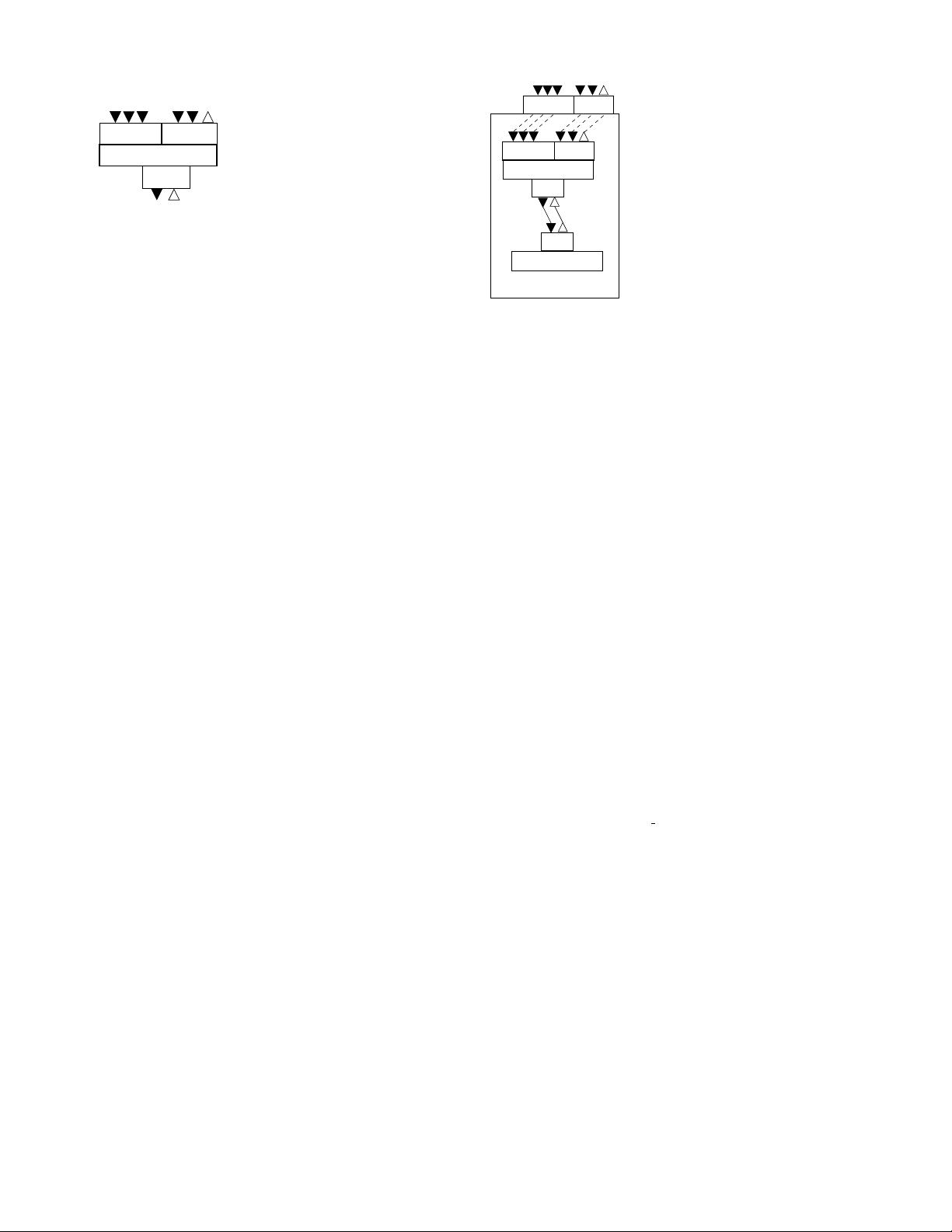
Figure 2: Specification and graphical depiction of the
TimerM component. Provided interfaces are shown above the
TimerM component and used interfaces are below. Downward
arrows depict commands and upward arrows depict events.
interface StdControl {
command result_t init();
command result_t start();
command result_t stop();
}
interface Timer {
command result_t start(char type, uint32_t interval);
command result_t stop();
event result_t fired();
}
interface Clock {
command result_t setRate(char interval, char scale);
event result_t fire();
}
interface SendMsg {
command result_t send(uint16_t address,
uint8_t length,
TOS_MsgPtr msg);
event result_t sendDone(TOS_MsgPtr msg,
result_t success);
}
Figure 3: Sample TinyOS interface types.
nents and functionality are not included in the application
binary. Inlining occurs across component boundaries and
improves both size and efficiency; Section 3.1 evaluates
these optimizations.
A component has two classes of interfaces: those it pro-
vides and those it uses. These interfaces define how the
component directly interacts with other components. An
interface generally models some service (e.g., sending a
message) and is specified by an interface type. Figure 2
shows a simplified form of the TimerM component, part
of the TinyOS timer service, that provides the StdCon-
trol and Timer interfaces and uses a Clock interface (all
shown in Figure 3). A component can provide or use the
same interface type several times as long as it gives each
instance a separate name.
Interfaces are bidirectional and contain both commands
and events. A command is a function that is implemented
by the providers of an interface, an event is a function that
is implemented by its users. For instance, the Timer inter-
face (Figure 3) defines start and stop commands and a
fired event. Although the interaction between the timer
and its client could have been provided via two separate in-
terfaces (one for its commands and another for its events),
grouping them in the same interface makes the specifica-
tion much clearer and helps prevent bugs when wiring com-
ponents together.
nesC has two types of components: modules and config-
urations. Modules provide code and are written in a dialect
of C with extensions for calling and implementing com-
HWClock
Clock
TimerC
TimerM
Clock
StdControl
Timer
StdControl
Timer
configuration TimerC {
provides {
interface StdControl;
interface Timer[uint8_t id];
}
}
implementation {
components TimerM, HWClock;
StdControl = TimerM.StdControl;
Timer = TimerM.Timer;
TimerM.Clk -> HWClock.Clock;
}
Figure 4: TinyOS’s Timer Service: the TimerC configura-
tion.
mands and events. A module declares private state vari-
ables and data buffers, which only it can reference. Config-
urations are used to wire other components together, con-
necting interfaces used by components to interfaces pro-
vided by others. Figure 4 illustrates the TinyOS timer ser-
vice, which is a configuration (TimerC) that wires the timer
module (TimerM) to the hardware clock component (HW-
Clock). Configurations allow multiple components to be
aggregated together into a single “supercomponent” that
exposes a single set of interfaces. For example, the TinyOS
networking stack is a configuration wiring together 21 sep-
arate modules and 10 sub-configurations.
Each component has its own interface namespace,
which it uses to refer to the commands and events that
it uses. When wiring interfaces together, a configuration
makes the connection between the local name of an inter-
face used by one component to the local name of the inter-
face provided by another. That is, a component invokes an
interface without referring explicitly to its implementation.
This makes it easy to perform interpositioning by introduc-
ing a new component in the component graph that uses and
provides the same interface.
Interfaces can be wired multiple times; for example, in
Figure 5 the StdControl interface of Main is wired to
Photo, TimerC, and Multihop. This fan-out is transpar-
ent to the caller. nesC allows fan-out as long as the return
type has a function for combining the results of all the calls.
For example, for result t, this is a logical-AND; a fan-
out returns failure if any subcall fails.
A component can provide a parameterized interface that
exports many instances of the same interface, parameter-
ized by some identifier (typically a small integer). For ex-
ample, the the Timer interface in Figure 2 is parameterized
with an 8-bit id, which is passed to the commands and
events of that interface as an extra parameter. In this case,
the parameterized interface allows the single Timer com-
ponent to implement multiple separate timer interfaces, one
for each client component. A client of a parameterized in-
terface must specify the ID as a constant in the wiring con-
figuration; to avoid conflicts in ID selection, nesC provides
a special unique keyword that selects a unique identifier
for each client.
Every TinyOS application is described by a top-level
configuration that wires together the components used. An
example is shown graphically in Figure 5: SurgeC is a sim-
ple application that periodically (TimerC) acquires light
剩余14页未读,继续阅读
2018-03-19 上传
105 浏览量
2023-04-21 上传
2023-10-11 上传
2023-05-30 上传
2024-06-22 上传
2023-09-07 上传
2023-05-31 上传

zhaoqian_sunny
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建Cadence PSpice仿真模型库教程
- VMware 10.0安装指南:步骤详解与网络、文件共享解决方案
- 中国互联网20周年必读:影响行业的100本经典书籍
- SQL Server 2000 Analysis Services的经典MDX查询示例
- VC6.0 MFC操作Excel教程:亲测Win7下的应用与保存技巧
- 使用Python NetworkX处理网络图
- 科技驱动:计算机控制技术的革新与应用
- MF-1型机器人硬件与robobasic编程详解
- ADC性能指标解析:超越位数、SNR和谐波
- 通用示波器改造为逻辑分析仪:0-1字符显示与电路设计
- C++实现TCP控制台客户端
- SOA架构下ESB在卷烟厂的信息整合与决策支持
- 三维人脸识别:技术进展与应用解析
- 单张人脸图像的眼镜边框自动去除方法
- C语言绘制图形:余弦曲线与正弦函数示例
- Matlab 文件操作入门:fopen、fclose、fprintf、fscanf 等函数使用详解
