西门子PLC温度控制PID手册
需积分: 25 182 浏览量
更新于2024-07-23
1
收藏 1.26MB PDF 举报
"PID_温度控制手册"
PID(比例-积分-微分)控制器是一种广泛应用的自动控制算法,尤其在温度控制领域中,它被广泛应用于各种工业自动化系统,如西门子的PLC(可编程逻辑控制器)系统。这份手册详细介绍了如何利用PID控制原理来实现精确的温度控制。
首先,手册提到了"连续温度控制器"FB58“TCONT_CP”,这是西门子PLC系统中用于实现连续控制的模块,适用于需要连续调节温度的场合,如加热和冷却过程。FB58内部集成了PID算法,通过不断调整输出信号以保持设定点与实际测量值之间的偏差最小,从而实现温度的稳定。
在FB58“TCONT_CP”的控制器整定部分,手册会指导用户如何调整PID参数,包括比例(P)、积分(I)和微分(D)三个部分。比例项负责快速响应偏差,积分项用于消除静差,而微分项则可以预测并减少未来可能出现的偏差。正确整定这三个参数对于获得良好的控制性能至关重要。
接着,手册介绍了"步进温度控制器"FB59“TCONT_S”,这适用于需要进行阶跃式温度变化的场景。与连续控制器不同,步进控制器通常在设定的时间间隔内切换加热或冷却状态,以达到预设的温度阶跃。
"使用入门"章节将提供给读者一个逐步的指南,帮助他们理解如何配置和操作这两个温度控制器,包括编程、参数设置以及故障排查等。
"温度控制器实例"部分则通过具体的案例分析,让读者更好地理解PID控制在实际应用中的工作原理和效果,这些实例可能包括不同行业的温度控制挑战,如化工、食品加工或制造业。
附录部分包含了术语表和索引,方便用户查找特定的信息,例如PID相关术语的定义,以及在手册中提到的所有功能和概念。
安全指南是任何技术文档不可或缺的部分,手册中强调了遵守安全规定的重要性,以防止人身伤害和设备损坏。警告和注意事项提示用户必须是经过培训和授权的合格人员才能操作设备,并且设备必须按照指定方式运输、存储、安装和维护。
"PID_温度控制手册"是一份全面的参考资料,旨在帮助工程师和技术人员有效地利用PID控制器在西门子PLC系统中实现精准的温度控制。通过学习和实践,用户将能够优化控制策略,提高生产效率,同时确保系统的安全和稳定性。

连续温度控制器
FB 58“TCONT_CP”
PID 温度控制
2-2 A5E00447393-02
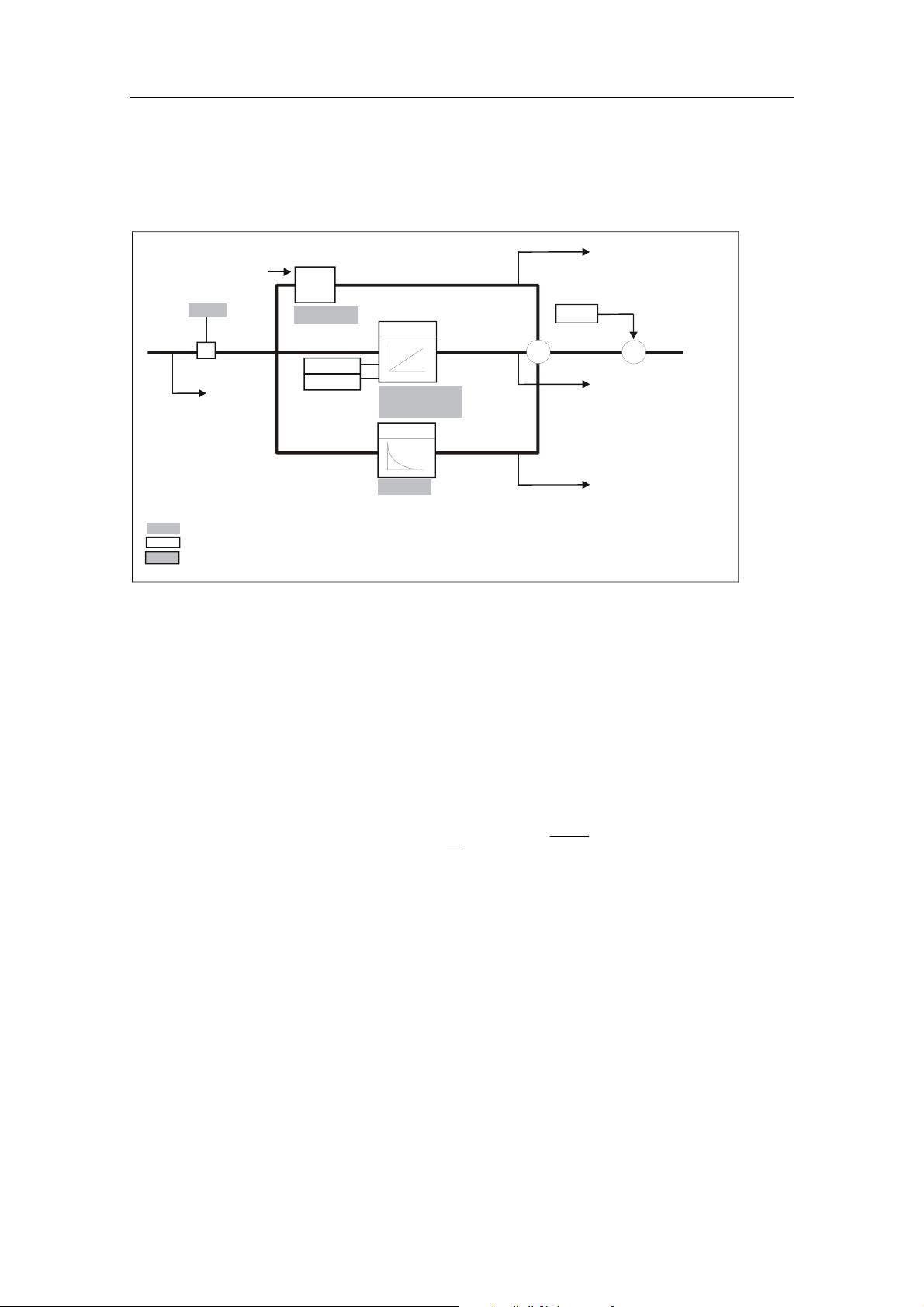
过程值格式转换 CRP_IN (PER_MODE)
CRP_IN 功能根据开关 PER_MODE,依据下列规则,将外围设备值 PV_PER 转换
成浮点数格式:
PER_MODE CRP_IN 的输出 模拟量输入类型 单位
0 PV_PER * 0.1
热电偶;PT100/NI100;标准 °C;
°F
1 PV_PER * 0.01
PT100/NI100;气候; °C;
°F
2 PV_PER *
100/27648
电压/电流
%
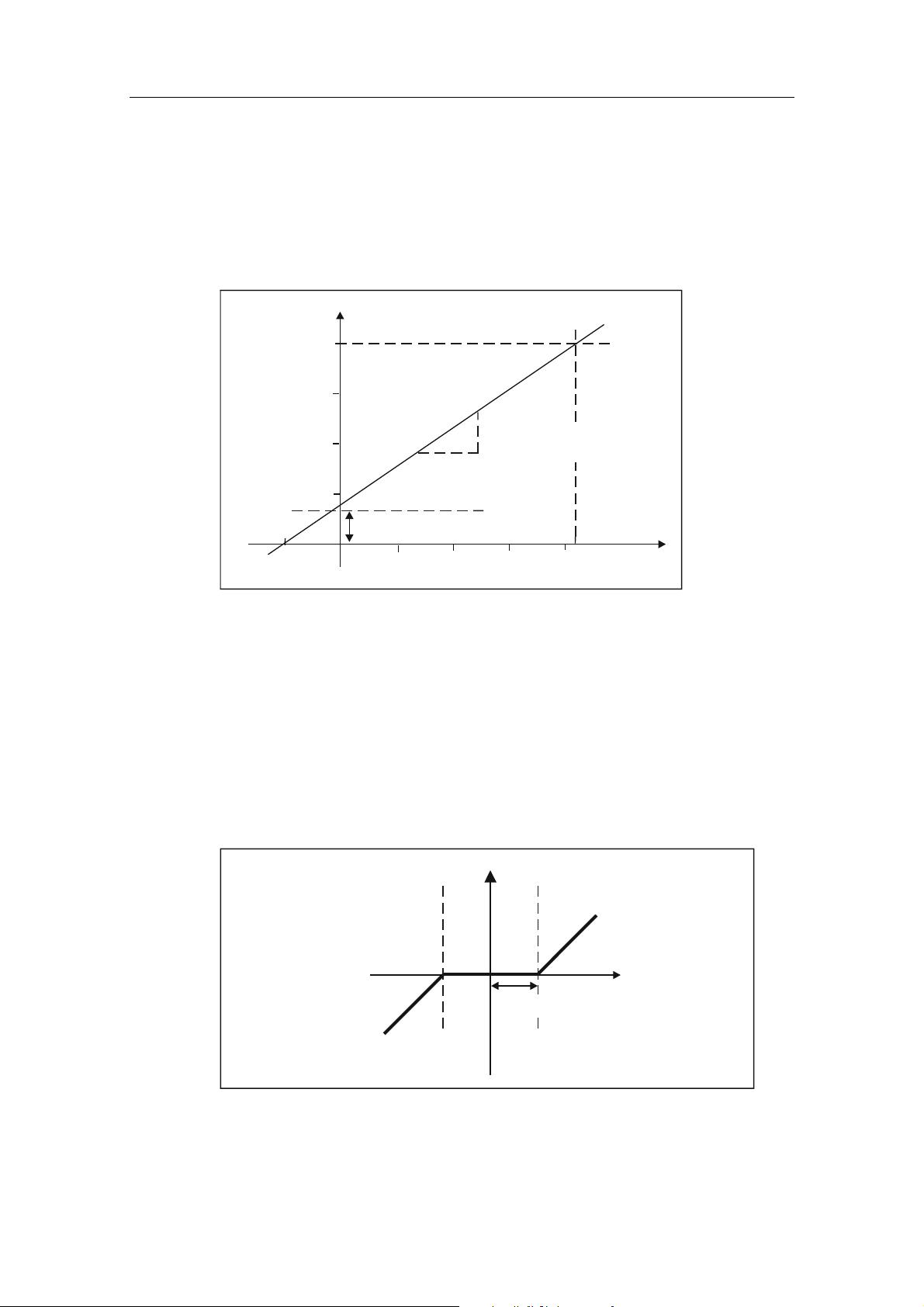
过程值规格化 PV_NORM (PF_FAC,PV_OFFS)
PV_NORM 功能依据下列规则计算 CRP_IN 的输出:
“PV_NORM 的输出”=“CPR_IN 的输出” * PV_FAC + PV_OFFS
它具有下列用途:
• 通过过程值因子 PV_FAC 和过程值偏移量 PV_OFFS,对过程值进行修正。
• 将温度值规格化为百分比值
需要以百分比形式输入设定值,现在必须将测得的温度值转换成百分比值。
• 将百分比值规格化为温度值
需要按照物理温度单位输入设定值,现在必须将测得的电压/电流值转换成温度
值。
参数的计算:
• PV_FAC = PV_NORM 的取值范围/CRP_IN 的取值范围;
• PV_OFFS = LL(PV_NORM) - PV_FAC * LL(CRP_IN);
其中,LL 是下限值。
对于缺省值(PV_FAC = 1.0 和 PV_OFFS = 0.0),禁止规格化。有效的过程值在 PV
输出端输出。
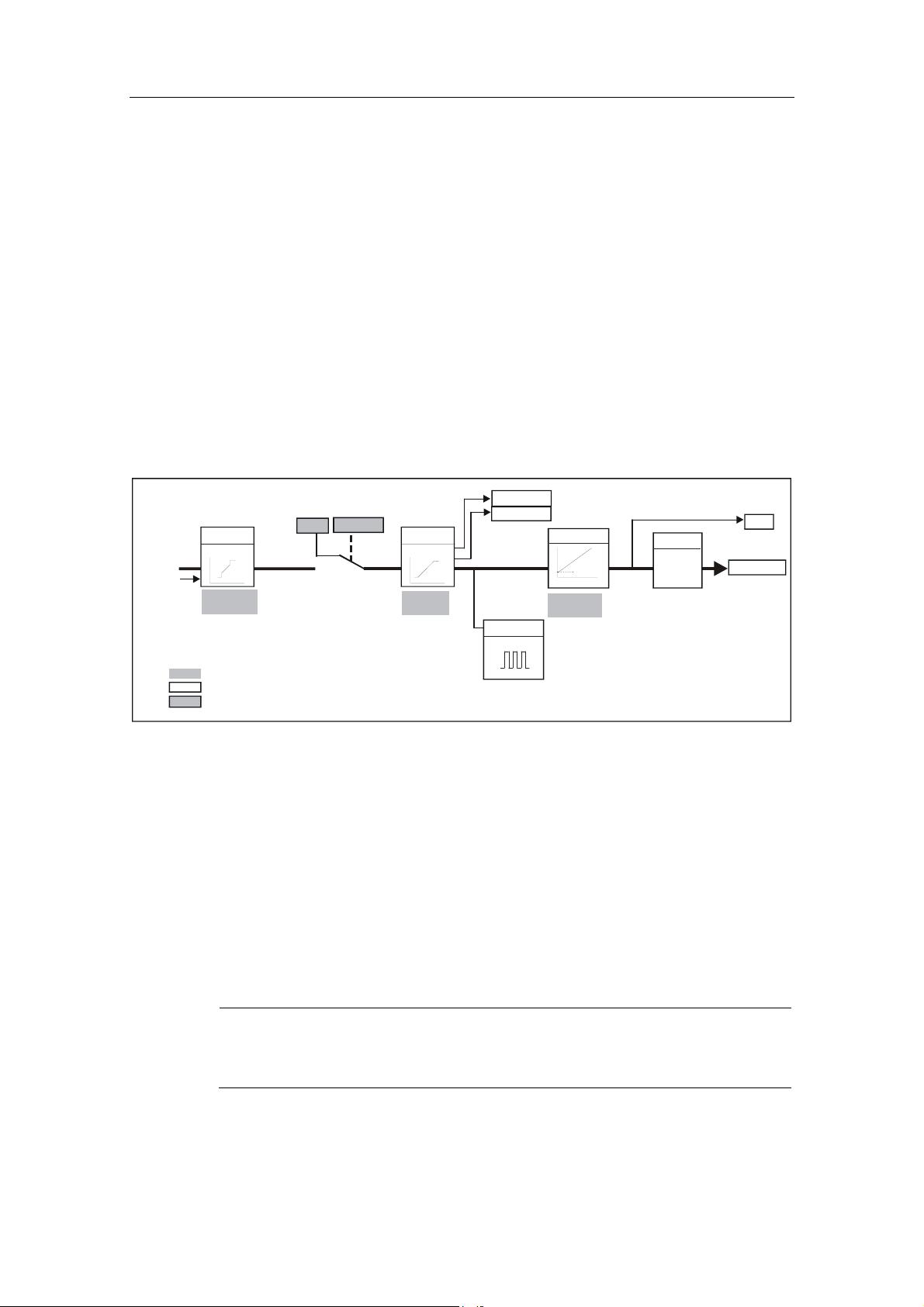
注意
对于脉冲控制,必须在更快的脉冲调用中将过程值传送到功能块中(原因:均值过
滤)。否则,控制质量可能会恶化。
剩余98页未读,继续阅读
2022-07-15 上传
205 浏览量
131 浏览量
286 浏览量
158 浏览量
207 浏览量

cpetc
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







