ROV运动系统通信协议1.01详解:操作模式与传感器控制
需积分: 0 41 浏览量
更新于2024-08-04
收藏 20KB DOCX 举报
ROV运动系统通信协议1.01是一种专用于上位机与下位机之间交互的网络协议,主要用于控制ROV(遥控潜水器)的运动和状态监控。该协议设计为双向通信,其中包含了明确的数据结构和指令编码规则。
协议的核心特点包括:
1. **帧结构**:
- 帧头:每条数据包的起始标识符为FEFE,用于区分数据包和确认信息。
- 数据包长度:上行数据包为27字节,下行数据包为28字节。
- 帧尾:固定为0XFD,表示数据包结束。
2. **数据段解析**:
- 操作模式:前两个字节指示是手柄操作还是UI(用户界面)操作,用于决定哪些数据被处理。
- PWM值:4-7字节表示传感器采集板1上的LED PWM值,8-9字节表示舵机1的PWM值,实际应用中可能只改变一次。
- 摇杆值:20-23字节优先选择,当有转向值时,可能覆盖前进和侧移值。
- 异或校验:24字节用于检测数据包传输的错误,通过计算数据的异或和校验。
3. **实例应用**:
- LED及舵机测试:上位机发送0xFEFE030003B603B6...序列来控制LED和舵机,包括LED滑块值和舵机位置。
- 下位机反馈:下位机将舱内传感器信息(温度和漏水检测)、舱2传感器信息、深度信息等打包成28字节的数据包返回给上位机。
4. **数据编码**:
- 温度和漏水信息采用无符号16位整数(u16)编码,高位在前,例如26.1度用0x0104表示。
- 深度信息同样乘以100后以u16格式传递,保留两位小数。
ROV运动系统通信协议1.01确保了高效且可靠的设备控制,通过标准化的帧结构和数据格式,使得上位机和下位机能够理解和响应彼此的请求,实现远程操控和实时状态监控。在实际应用中,遵循协议规范对于确保ROV系统的稳定性和性能至关重要。
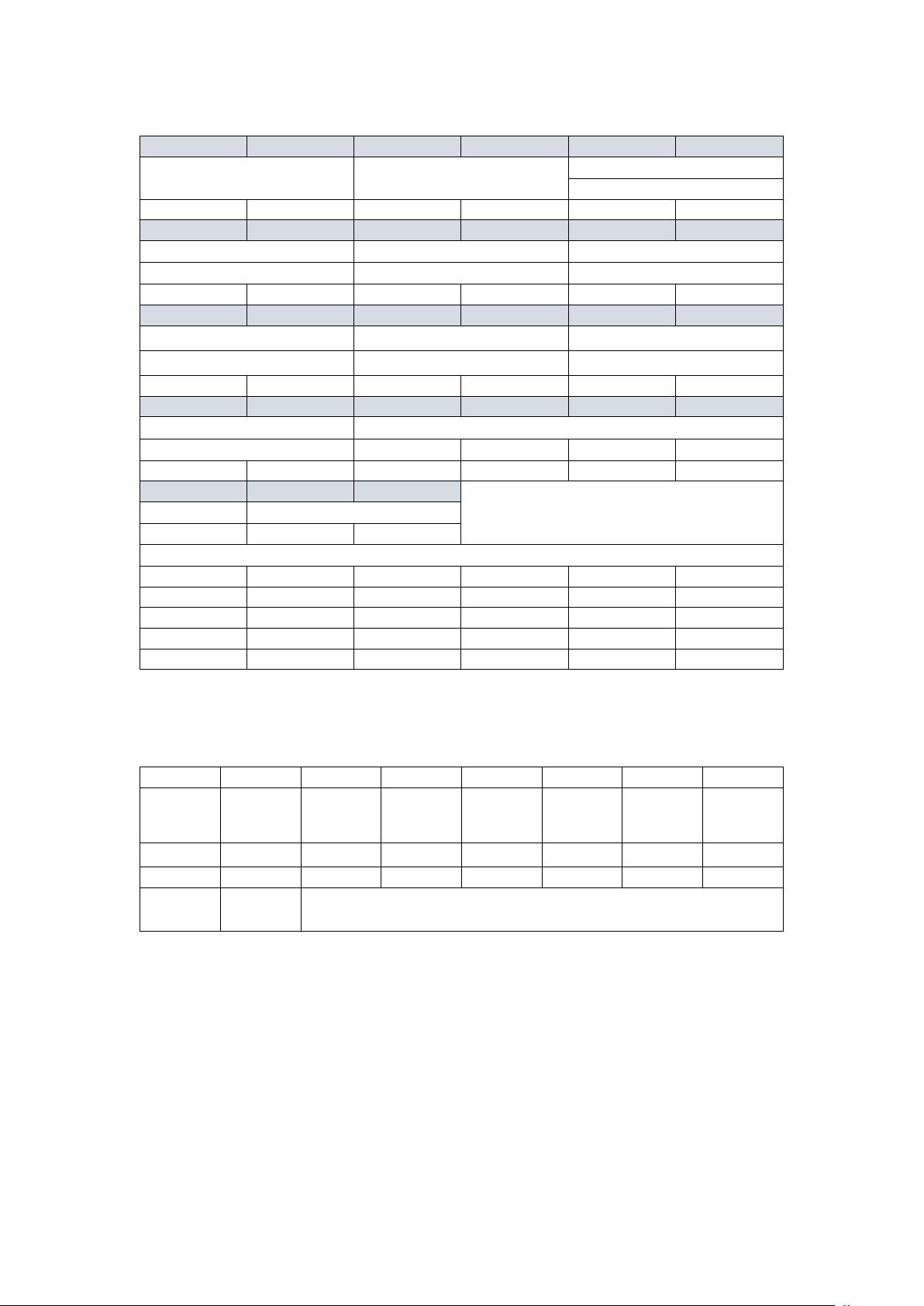
上位机往下位机发数据协议格式,附例子
0
1
2
3
4
5
传感器采集板 1
帧头
信息字
LED1
0XFE
0XFE
0X0F
0X01
0X00
0X00
6
7
8
9
10
11
传感器采集板 2
传感器采集板 1
传感器采集板 2
LED2
舵机 1
舵机 2
0X00
0X00
0X05
0XDC
0X05
0XDC
12
13
14
15
16
17
传感器采集板 1
传感器采集板 2
驱动板
舵机预留 1
舵机预留 2
舵机预留 3
0X05
0XDC
0X05
0XDC
0X05
0XDC
18
19
20
21
22
23
驱动板
摇杆值
舵机预留 3
前后
侧移
方向
上下
0X05
0XDC
0X7F
0X7F
0X7F
0X7F
24
25
26
异或校验和
帧尾
0XFF
0xFD
0xFD
帧例子
FE
FE
07
07
01
F4
01
F4
05
DC
05
DC
00
00
00
00
00
00
00
00
7F
7F
7F
7F
00
FD
FD
开灯:FE FE 01 0f 01 F4 01 F4 05 DC 05 DC 00 00 00 00 00 00 00 00 7F 7F 7F 7F 00 FD FD
数据包为 27 个字节,以下为详解。
0-1 字节:帧头,固定为 0xFE。
2-3 字节:每一个位表示本数据包中包含的信息,具体如下
bit0
bit1
Bit2
Bit3
Bit4
Bit5
Bit6
Bit7
传感器采
集板 1
LED1
传感器采
集板 2
LED2
传感器采
集板 1
舵机 1
传感器采
集板 2
舵机 1
传感器采
集板 1
舵机 2
传感器采
集板 2
舵机 2
驱动板
舵机 1
驱动板
舵机 2
前灯
后灯
舵机 1
舵机 2
预留 1
预留 2
预留 3
预留 4
Bit8
Bit9
Bit10
Bit11
Bit12
Bit13
Bit14
Bit15
操作模
式 0/1
是否闭
环
保留
操作模式指手柄操作还是 UI 操作
如果某个位置 1,就表示改位所对应的数据被传递。下位机根据这两个字节的信息解析数
据包。如果某个数据帧被传递,而对应的改位并没有置 1,则下位机会忽视该该数据帧,
不执行动作。
4-7 字节:表示传感器采集板 1 上面的 LED 的 PWM 值,其中 4-5 两个字节表示 LED1 的 PWM
数值,6-7 表示 LED2 的 PWM 数值,其实这两个值是相等的,在下位机中统一控制。
数据范围:0-950
8-9 字节:表示传感器采集板 1 上面的舵机 1 的 PWM 值。
数据范围:500-2500
12-19 字节:保留舵机值
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-10 上传
2021-11-26 上传
2023-07-31 上传
2023-05-20 上传
2023-11-10 上传
2023-07-09 上传
2023-09-29 上传
2023-10-18 上传
2024-02-07 上传

王元祺
- 粉丝: 243
- 资源: 303
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
