INPHO无人机影像处理步骤详解
"INPHO无人机影像处理教程"
INPHO无人机影像处理教程是一份详细的指导资料,由作者Lygisxj在2011年10月编写,旨在教授如何利用INPHO软件对无人机拍摄的影像进行处理。教程涵盖了从数据准备到最终成果生成的整个工作流程,包括数字空三、DSM(数字表面模型)生成、DOM(数字正射影像图)生成和影像拼接匀光等关键步骤。
1. 数据准备是影像处理的基础,主要包括以下几类数据:
- 相机检验报告:提供相机参数,通常以Word文档形式存在。
- GPS摄站坐标:用于初步匹配,存储为txt文件,包含相片号、X坐标、Y坐标、高程以及姿态参数。
- 航线定义文件:定义无人机飞行轨迹,格式不限,关键在于能清晰表述航线信息。
- 地面控制点坐标:用于精确控制,同样为txt文件,列出点号、X坐标、Y坐标和高程。
2. 数字空三(Digital Stereophotogrammetry)是无人机影像处理的重要环节,涉及到相机参数定义、影像和控制点的导入、匹配点的标定与剔除以及匹配调整。
3. DSM生成:在定义输出参数后,利用无人机影像和地面控制点数据生成DSM,反映地表的不规则地形。
4. DOM生成:基于DSM进行正射纠正,生成DOM,这是一种无倾斜、无透视的鸟瞰图。
5. 拼接匀光:将多张正射影像进行无缝拼接,并通过匀光处理使影像色彩均匀一致。
6. 工程组织结构:建议按照特定目录结构组织测区数据,如Images存放原始影像,input放置生产准备数据,Project中保存工程文件、计算过程和结果。
7. GPS摄站坐标和相机参数:GPS摄站的相对坐标可能影响精确度,但通常在不需要极高精度时可以忽略。相机参数输入和畸变系数的计算至关重要,因为它们决定了影像矫正的质量。
8. 测区平均高程的计算:输入影像的平均高程对于某些过程是必要的,但不需非常精确,可以通过地面控制点、SRTM DEM数据或简单估算来确定。
这个教程不仅提供了数据处理的详细步骤,还提到了实际操作中的注意事项,对于理解和应用INPHO软件进行无人机影像处理是非常宝贵的资源。通过学习和实践,用户可以掌握从影像获取到最终产品生成的全过程,从而有效地处理无人机拍摄的数据,生成用于测绘、监测或其他应用的高精度图像产品。
INPHO 无人机影像处理简明教程
时间:2011 年 10 月
作者:Lygisxj
联系:Lygisxj@163.com, QQ 285541670
软件:请联系作者获得工程版或试用版软件
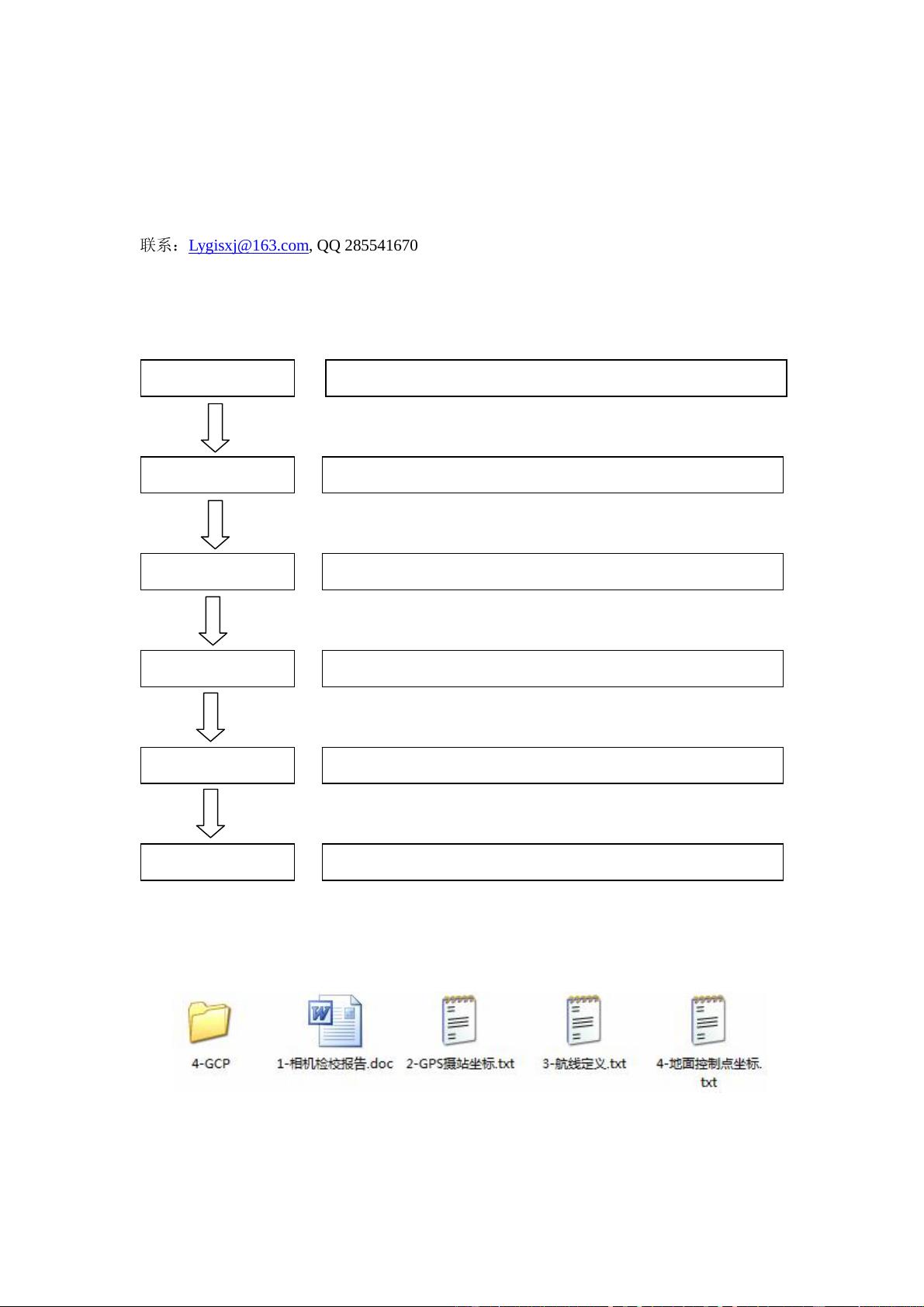
1 INPHO 无人机影像处理流程示意图
2 数据准备
准备无人机影像处理的条件,主要有 4 项数据,如下
相机检验报告用于计算相机参数。GPS 摄站坐标用于初匹配。航线定义用于建立航线。地
面控制点坐标用于精确控制。也选项为 SRTM 的 90 米 DEM 数据用于空三的初步匹配。
数据格式说明:
1
数据准备
3
数字空三
2
建立工程
4 DSM
生成
5 DOM
生成
6
拼接匀光
相机检验报告,GPS 摄站坐标,航线定义,控制点坐标
相机定义,导入影像、GPS 摄站坐标、控制点坐标,建立航线
标定控制点、初匹配、自动匹配、点剔除、调整匹配
定义输出参数、生成 DSM
引入 DSM、设置参数、正射纠正
添加影像、设置区域、设置参数、拼接匀光
下载后可阅读完整内容,剩余5页未读,立即下载
2078 浏览量
817 浏览量
点击了解资源详情
260 浏览量
点击了解资源详情
124 浏览量
235 浏览量

aa532013883
- 粉丝: 2
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- 嵌入式系统综述 pdf文件 讲解了软件和硬件,以及开发
- VLAN在校园网中的应用方案设计
- C++设计模式.pdf (C++ 详细描述经典设计模式)
- 计算机一级网上测试系统
- 搭建SVN使用说明及原理说明
- VC编程资料\网络编程实用教程_相关章节实例源程序清单.doc
- sqlsever 2005 操作数据库
- redhat linux手册
- Office SharePoint Server 2007 Install Guide.pdf
- asp.net,php等web开发教程
- Keil C51 vs 标准C
- 挑战SOC-基于NIOS的SOPC设计于实践
- VC++ 6.0 - Advanced MFC Programming
- C++风格的C经典程序
- PLL锁相环的ADS仿真
- delphi6database编程
