使用MATLAB与ROS接口:ROSToolbox用户指南
需积分: 10 34 浏览量
更新于2024-07-16
收藏 12.67MB PDF 举报
"ROS Toolbox 用户指南 R2020a 版"
ROS Toolbox 是一个 MATLAB 库,它为用户提供了与使用 Robot Operating System (ROS) 的物理机器人或像 Gazebo 这样的机器人模拟器进行数据交换的功能。ROS 是一个通信接口,允许机器人系统的不同部分发现彼此,并在它们之间发送和接收数据。本用户指南旨在帮助用户了解如何在 MATLAB 环境中设置和使用 ROS。
首先,要设置 ROS 在 MATLAB 中的工作环境,你需要确保你的系统已经安装了 ROS 并且 MATLAB 工具箱配置正确。这通常涉及到设置 ROS 的环境变量,如 `ROS_MASTER_URI` 和 `ROS_IP`,以及添加必要的 ROS 包到 MATLAB 的路径中。你可以通过 MATLAB 的命令行界面执行这些操作,或者使用工具箱提供的特定函数来自动化这个过程。
其次,了解 ROS 网络中的功能是非常重要的。ROS 网络由各种节点、话题、服务和参数组成,这些元素共同构成了机器人系统的通信结构。你可以使用 MATLAB 中的函数来查询 ROS 网络中的节点信息,查看正在运行的节点列表,以及获取节点所提供的服务和话题。此外,你还可以检查网络中的参数服务器,用于存储和共享全局参数。
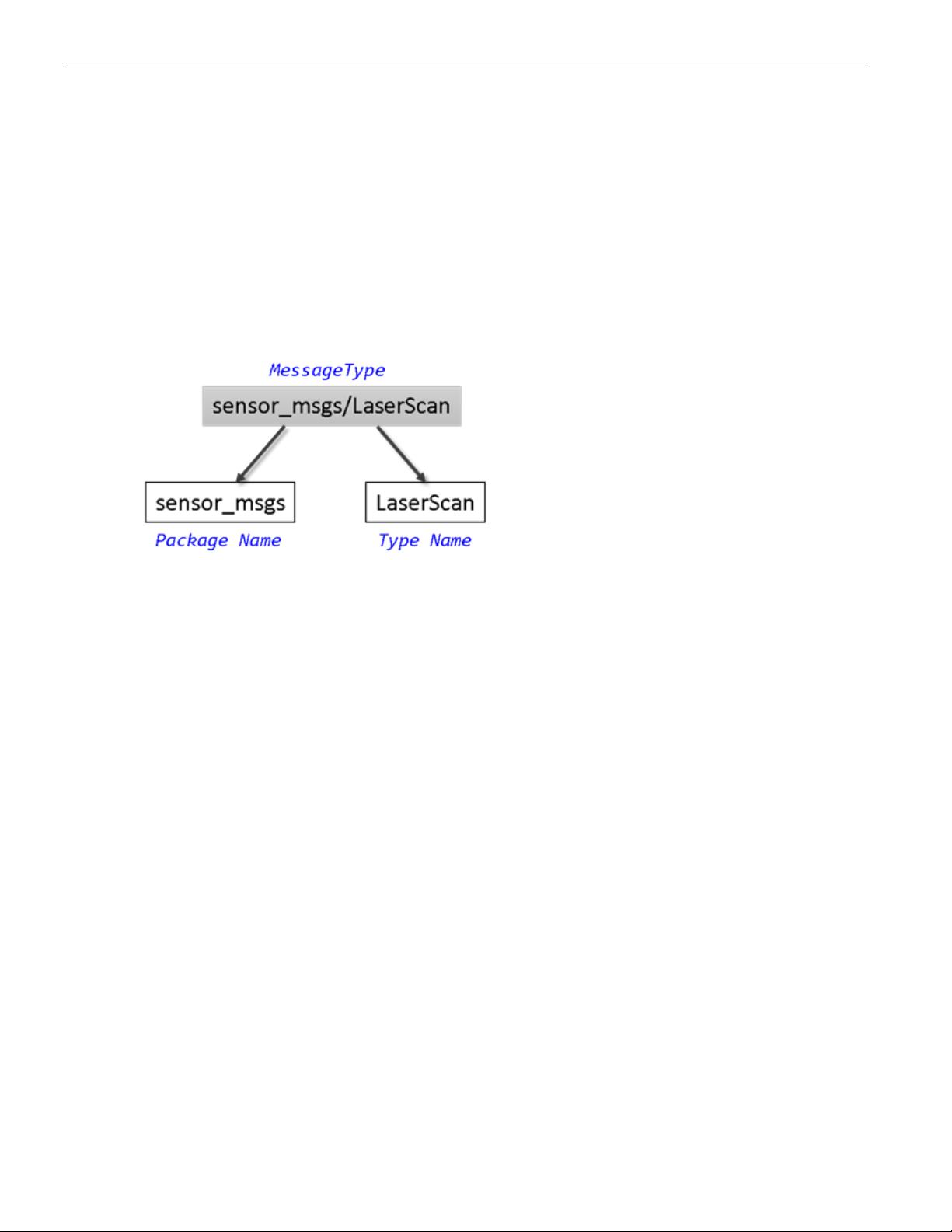
接下来,ROS 消息是节点间通信的主要载体。ROS 支持多种类型的消息,包括标准数据类型(如 int32、float64)和自定义消息类型。在 MATLAB 中,你可以创建 ROS 订阅者(subscribers)来接收特定话题的消息,也可以创建发布者(publishers)来发布消息。ROS Toolbox 提供了方便的接口,使得在 MATLAB 中处理这些消息变得简单,包括数据类型的转换和消息的序列化与反序列化。
在实际应用中,你可能还需要使用到 ROS 的服务(services)。服务是一对一的请求-响应通信方式,允许一个节点向另一个节点请求执行某个操作。MATLAB 提供的函数可以帮助你创建服务客户端和服务服务器,处理服务调用和响应。
除此之外,ROS Toolbox 还支持与 Gazebo 仿真器的集成。Gazebo 是一个流行的开源机器人仿真平台,可以模拟各种环境和机器人。通过 MATLAB,你可以控制 Gazebo 中的机器人模型,发送运动指令,以及获取传感器数据,进行实时仿真和测试。
ROS Toolbox 是 MATLAB 与 ROS 交互的强大工具,它提供了一系列的函数和接口,使得开发者能够轻松地在 MATLAB 开发环境中进行 ROS 相关的工作,包括系统设置、网络探索、消息处理、服务调用以及与 Gazebo 的交互。无论你是机器人学的学生还是专业的软件开发者,这个工具箱都将极大地提升你的工作效率和项目开发能力。

Access the ROS Parameter Server
This example explores how to add and retrieve parameters on the ROS parameter server. The
parameter server usually runs on the same device that launches the ROS master. The parameters are
accessible globally over the ROS network and can be used to store static data such as conguration
parameters. Supported data types include strings, integers, doubles, logicals, and cell arrays.
Prerequisites: “Get Started with ROS” on page 1-2, “Connect to a ROS Network” on page 1-6
Create Parameter Tree
Start the ROS master and parameter server in MATLAB.
rosinit
Initializing ROS master on http://bat5110win64:51471/.
Initializing global node /matlab_global_node_14580 with NodeURI http://bat5110win64:51475/
Create a parameter tree object to interact with the parameter server. Use the parameter tree to
interact with the parameter server and call functions such as set, get, del, has and search. Create
a new parameter server using rosparam.
ptree = rosparam
ptree =
ParameterTree with properties:
AvailableParameters: {}
Add New Parameters
To set a parameter for the robot IP address, use the parameter name ROBOT_IP. Check if a
parameter with the same name already exists. Use the has function.
has(ptree,'ROBOT_IP')
ans = logical
0
If has returns 0 (false) as the output, then the ROBOT_IP name could not be found on the parameter
server.
Add some parameters indicating a robot's IP address to the parameter server. Use the set function
for this purpose.
set(ptree,'ROBOT_IP','192.168.1.1');
set(ptree,'/myrobot/ROBOT_IP','192.168.1.100');
The ROBOT_IP parameters are now available to all nodes connected to this ROS master. You can
specify parameters within a namespace. For example, the /myrobot/ROBOT_IP parameter is within
the /myrobot namespace in this example.
Set more parameters with dierent data types.
set(ptree,'MAX_SPEED',1.5);
1
ROS Featured Examples
1-10



剩余359页未读,继续阅读
320 浏览量
103 浏览量
765 浏览量
320 浏览量
134 浏览量
183 浏览量
2023-08-19 上传
273 浏览量

时光竺梦
- 粉丝: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实现大视图进度条的自定义控件bigviewprogressbar
- 深入学习高级屏幕截图技术教程
- Apiton-Vue Nuxt应用模板入门与使用指南
- Python控制的智能婴儿监护机器
- ZHConverter实现中文简繁体互转技术详解
- venobo开源项目:基于Electron和React的Torrent流应用
- C语言实现Huffman编码文本压缩与解压缩技术
- 战斗力客户服务工单管理系统的实用功能与优势
- 个性化倒计时显示:支持时分秒与分秒毫秒
- Chrome扩展Multimedia Search:高效多格式文件搜索
- Karate DSL框架的介绍与Gherkin标签应用
- 基于OpenCV3.4.1的Android人脸静态识别技术
- 程序意外退出时自动保存与恢复文件技术解析
- 快速部署Redis MASTER实例的Shell脚本教程
- AutoHotkey v1.1.13.01中文帮助文档更新详情
- iOS自定义PageControl实现与应用
