ABB机器人I/O通信详解:DSQC651配置与Profibus应用
版权申诉
111 浏览量
更新于2024-07-02
收藏 5.37MB DOC 举报
本资源文档详细探讨了ABB机器人的I/O通信,重点围绕ABB工业机器人的I/O接口及其在实际应用中的配置和通信方式展开。首先,任务目标明确,即学习和掌握不同类型的I/O通信,包括但不限于ABB的标准I/O板如DSQC651的使用,以及如何通过Profibus适配器与PLC进行高效通信。
在具体操作中,以DSQC651为例,该板子主要用于创建数字输入(DI1)、数字输出(DO1)、组输入(GI1)和组输出(GO1)信号,以及模拟输出(AO1),并通过DeviceNet总线进行通信,地址设为10。通过这些I/O信号的监控和操作,实现了机器人的数据交换和控制。
此外,文档提到了ABB机器人支持的多种通信协议,如DeviceNet、RS232、Profibus-DP、Profinet、 EtherNet/IP等,这些协议使得机器人能无缝连接到各种外围设备,提高了生产效率和灵活性。ABB机器人还提供与PLC的集成选项,简化了通信设置,用户可以在机器人示教器上直接操控PLC。
文档特别关注了DSQC667模块,它利用Profibus技术进行大容量数据传输,适合处理更复杂的数据交互。对于实际应用中的IRC5控制柜接口,如图所示,清晰地标注了各种连接器的功能和用途,帮助用户理解硬件安装和配置过程。
本资源提供了全面的ABB机器人I/O通信知识,涵盖了基础的I/O板配置、通信协议选择、PLC集成以及实际接口操作,对于从事工业自动化和机器人技术的工程师来说,是理解和掌握ABB机器人I/O通信不可或缺的参考资料。
X4 端子编号
使用定义 地址分配
1
INPUT CH9
8
2
INPUT CH10
9
3
INPUT CH11
10
4
INPUT CH12
11
5
INPUT CH13
12
6
INPUT CH14
13
7
INPUT CH15
14
8
INPUT CH16
15
9 0V
10 24V
X4
端子:
X5、X3
端子同
DSQC651 板
3.ABB
标准
I/O
板
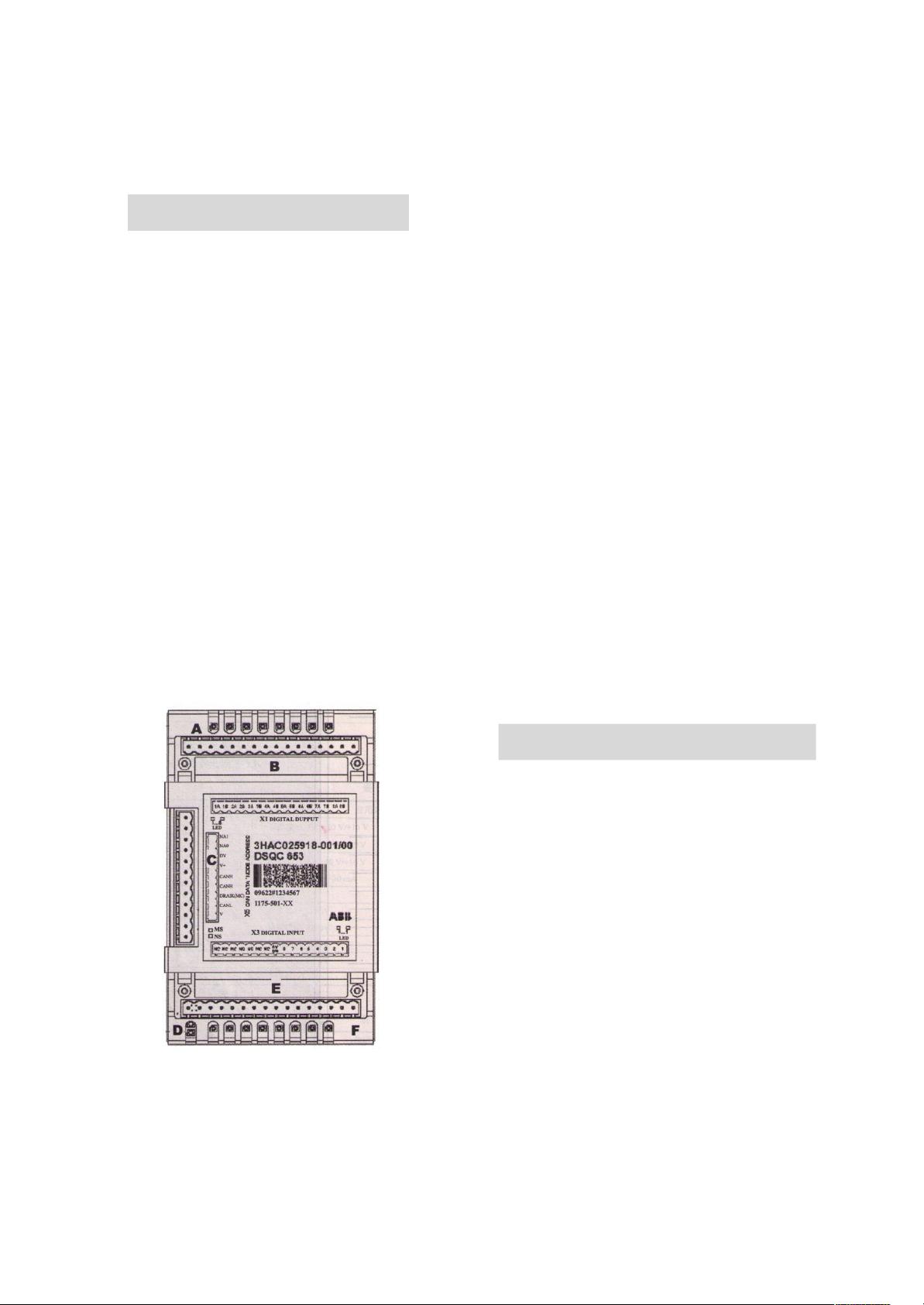
DSQC653
DSQC653
板主要提供
8
个数字输入信号和
8 个数字继电器输出信号的处理。
(1)模块接口说明
标号 说明
A
数字继电器输出信号指示灯
B X1 数字继电器输出信号接口
C X5
是
DeviceNet 接口
D 模板状态指示灯
E X3 数字输入信号接口
F 数字输入信号指示灯
(2)模块接口连接说明
X1 端子: X3 端子:
剩余33页未读,继续阅读
104 浏览量
点击了解资源详情
120 浏览量
2023-02-27 上传
124 浏览量
184 浏览量
196 浏览量
2023-09-16 上传
1072 浏览量

智慧安全方案
- 粉丝: 3844
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Kokoa-clone_var_2
- 毕业设计:基于图神经网络的异构图表示学习和推荐算法研究.zip
- SAMPLauncherNET:SAMPLauncherNET是San Andreas多人游戏的启动器
- learn-js:各种JavaScript示例的存储库,重点是更新的ES67代码
- Data-Science-Portfolio:所有DSC课程
- Splitfire:测试Splitfire
- 中兴盒子不开启adb情况下抓取日志和安装apk
- curso-django:在演示文稿中构建应用程序的通用框架或框架Django para Python nomóduloDjango durante或Bootcamp DevPro
- EventUtil.js:EventUtil.js
- 本科毕业设计的内容,社交媒体文本中的情感分析,运用了情感字典和机器学习的方法.zip
- TabbyNotes-crx插件
- 报名表格附件.rar
- quickcurver:著名游戏“ Achtung die Kurve”(也称为“ Curve Fever”)的QtC ++(OpenGL加速)实现
- startup-mashup:这个 repo 包含在 Startup Mashup 中举行的 Hackathon Web 问题的解决方案。 这里使用的语言是Java
- browsh:一种完全基于文本的浏览器,可渲染到TTY和浏览器
- Bitvavo Darker-crx插件
