STEP-SA1400机器人运动学建模与仿真:逆解优化
83 浏览量
更新于2024-08-31
收藏 454KB PDF 举报
"本文详细探讨了STEP-SA1400型工业机器人的运动学建模与仿真,通过分析其结构特点,建立运动学方程,并采用一种优化的逆解方法,减少计算复杂性,确保解的准确性。此外,还解决了逆解的多重解问题,运用‘最短行程’原则选择合适的关节角度,最终通过MATLAB仿真验证了方法的有效性。这种方法不仅对STEP-SA1400型机器人适用,也可推广到其他关节型机器人。"
在工业机器人领域,运动学是研究机器人各个部分相对运动的基础。对于STEP-SA1400型机器人,运动学建模主要涉及建立描述机器人运动的数学模型,这通常包括正运动学和逆运动学两个方面。正运动学是从关节变量(即各关节的角度)到末端执行器位置和姿态的映射,而逆运动学则是求解给定末端执行器位置时所需关节角度的过程。
在本文中,作者针对STEP-SA1400型机器人的结构特性,建立了该机器人的运动学方程。为了提高逆解效率,他们采用了只需一次矩阵逆乘的方法,大大降低了多次矩阵逆乘导致的计算负担。在求解过程中,采用双变量正切函数来避免解的丢失,这是解决非唯一逆解问题的一种策略,确保了所有可能的解都能被考虑。
针对逆解的多重解问题,作者提出了一种基于“最短行程”原则的解决方案。当存在多个解时,他们会选择与当前关节角度值的欧氏距离最小的那个解,这样可以保证机器人在实际操作中路径最短,运动更加平滑,同时也避免了因关节角度突变可能导致的机械结构碰撞。
验证和仿真阶段,作者使用MATLAB编程实现,通过对推导出的运动学方程进行数值计算,进一步证实了解的准确性和实用性。这些工作不仅为STEP-SA1400型机器人的离线编程和轨迹规划提供了理论基础,也为后续的控制系统设计和实时控制提供了便利。
本文的研究成果不仅有助于提升STEP-SA1400型机器人的性能,也展示了在关节型机器人设计中如何优化运动学模型和逆解算法,对于推动我国制造业的自动化升级,特别是在“中国制造2025”战略背景下,具有重要的理论价值和实践意义。
STEP-SA1400型机器人运动学建模与仿真型机器人运动学建模与仿真
:根据STEPSA1400型工业机器人的具体结构特点,建立了机器人的运动学方程,使用只需一次矩阵逆乘的逆
解方法,求出逆解。与常规求解方法相比,此方法减少了多次矩阵逆乘带来的计算量。在解的表达式中,采用
双变量正切函数以避免解的丢失。针对多重解问题,采用“最短行程”原则,选取与当前关节角度值的欧氏距离较
小的解作为逆解结果。最后,使用MATLAB编写程序,对文中推导出的方程进行验证与仿真,实验结果证明了
解的准确性和可行性。对该型机器人的运动学分析与仿真为其后的离线编程、轨迹规划等打下了基础,同时,
文中的方法与思想也适用于其他关节型机器人。
李庆1,谢一首1,郑力新1,周凯汀2,张裕坤1
(1.华侨大学 工学院,福建 泉州 362021;2.华侨大学 信息科学与工程学院,福建 厦门 361021)
摘要摘要:根据STEPSA1400型
关键词 关键词:工业机器人;
0引言引言
华侨大学研究生科研创新能力培育计划资助项目(1400422004)近年来,随着经济和社会的发展,我国出现人力成本上
涨、劳动力供给减少以及制造业就业意愿下降的现象,这些现象严重制约了我国制造业的国际竞争力。于是一些企业开始把目
光投向“机器换人”,利用自动化技术来建设无人化工厂以解决当前困局,制造业的转型升级已是大势所趋。面对德国提出的“工
业4.0”,我国出台的“中国制造2025”将重点发展工业机器人与新一代信息技术等领域,“智能制造”成为了中国制造的主攻方
向,而机器人也成为这一主题下最受关注的领域之一。实现“中国制造2025”,最重要的智能部件就是网络化的机器人,机器人
产业将成为未来几十年内全球制造业的角力场。2013年,中国工业机器人的总销量为3.7万台,成为世界第一的机器人大国,
也是全球增长速度最快的机器人市场。2014年,全球工业机器人的销量为22.9万台,中国内地售出5.7万台,占全球销量的四
分之一[1]。
目前,机器人正解的求法已比较统一,而逆解的求解方法有多种,主要分为封闭解法和数值解法。封闭解法又分为代数解
法和几何解法。封闭解法计算速度快、效率高、便于实时控制,而数值解法因其迭代性质,使其求解速度较慢,所以大多数情
况下都是使用封闭解法[23]。逆解过程中,一般在关节角度范围内计算机器人关节角度,文献[4]在解关节角时采用单变
量反正切函数,可能造成一个解的丢失。机器人逆解存在多解,如文献[5]中就有8组解,但控制机器人只能有一组解,而
文中没有给出选取最优解的方法。
1运动学模型的建立运动学模型的建立
本文根据上海新时达机器人有限公司SA系列工业机器人中的1400型机器人的特点进行研究。SA1400型机器人有6个自由
度,而且6个关节均为旋转关节。为了描述机器人各连杆之间的相对位置和方向关系,需要根据关节结构在每个连杆上建立一
个连杆坐标系。常用的方法是D-H (Denavit-Hartenberg)参数法,即使用矩阵方法来描述运动学问题。只要已知各关节的D-H
参数,就可根据正运动学公式A1A2A3A4A5A6=0T6得到机器人末端的位置和姿态[2]。
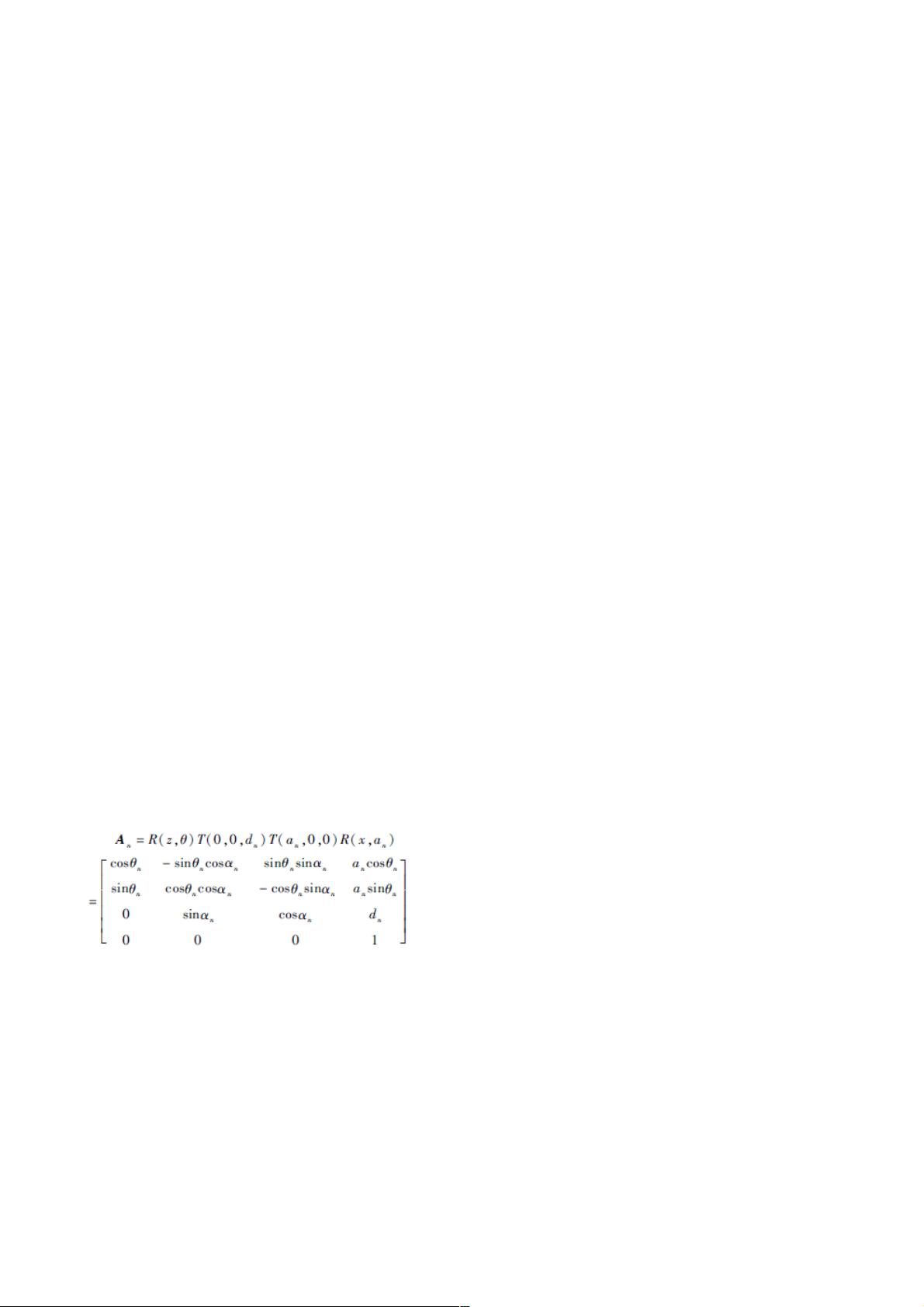
SA1400机器人各连杆坐标系如图1所示,相邻两连杆n-1与n之间的相对关系能够按照两次旋转和两次平移的四次齐次变
换来建立,并把齐次变换矩阵记为An。此关系式为:
式中:θn为关节n的旋转角度,即两连杆夹角,符合右手定则为正;dn为关节n的偏距,即两连杆距离;αn为关节n和n-1
轴线之间的夹角,即连杆扭角,符合右手定则为正;an为关节n和n-1轴线之间的公法线距离,即连杆长度,n=1,2,3…
6[5]。D-H参数表如表1。
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-14 上传
2021-08-14 上传
点击了解资源详情
2019-03-25 上传
2021-05-23 上传
204 浏览量
2023-04-24 上传
2022-06-02 上传
2021-08-05 上传

weixin_38537541
- 粉丝: 6
- 资源: 892
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
