MATLAB仿生拱泥机器人控制建模仿真与关键参数分析
版权申诉
77 浏览量
更新于2024-07-04
1
收藏 2.45MB PDF 举报
"基于MATLAB的拱泥机器人控制仿真研究"
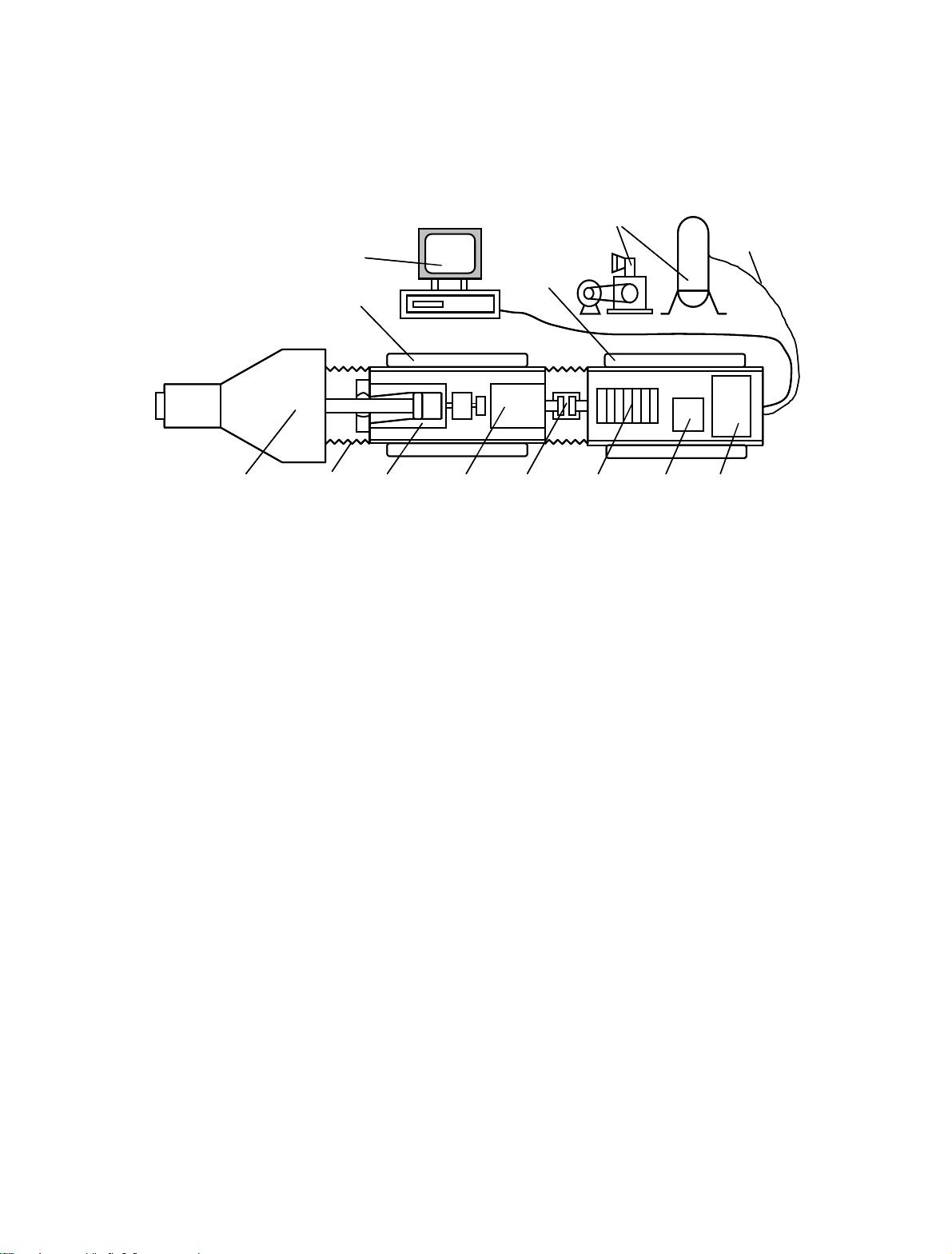
本文详细探讨了基于MATLAB的拱泥机器人控制仿真的各个方面,该研究由哈尔滨工程大学孟庆鑫教授提出,旨在应对水下复杂环境作业,如沉船打捞、管道敷设和检测等任务。拱泥机器人利用蠕动原理进行移动,其控制系统的开发极具挑战性。
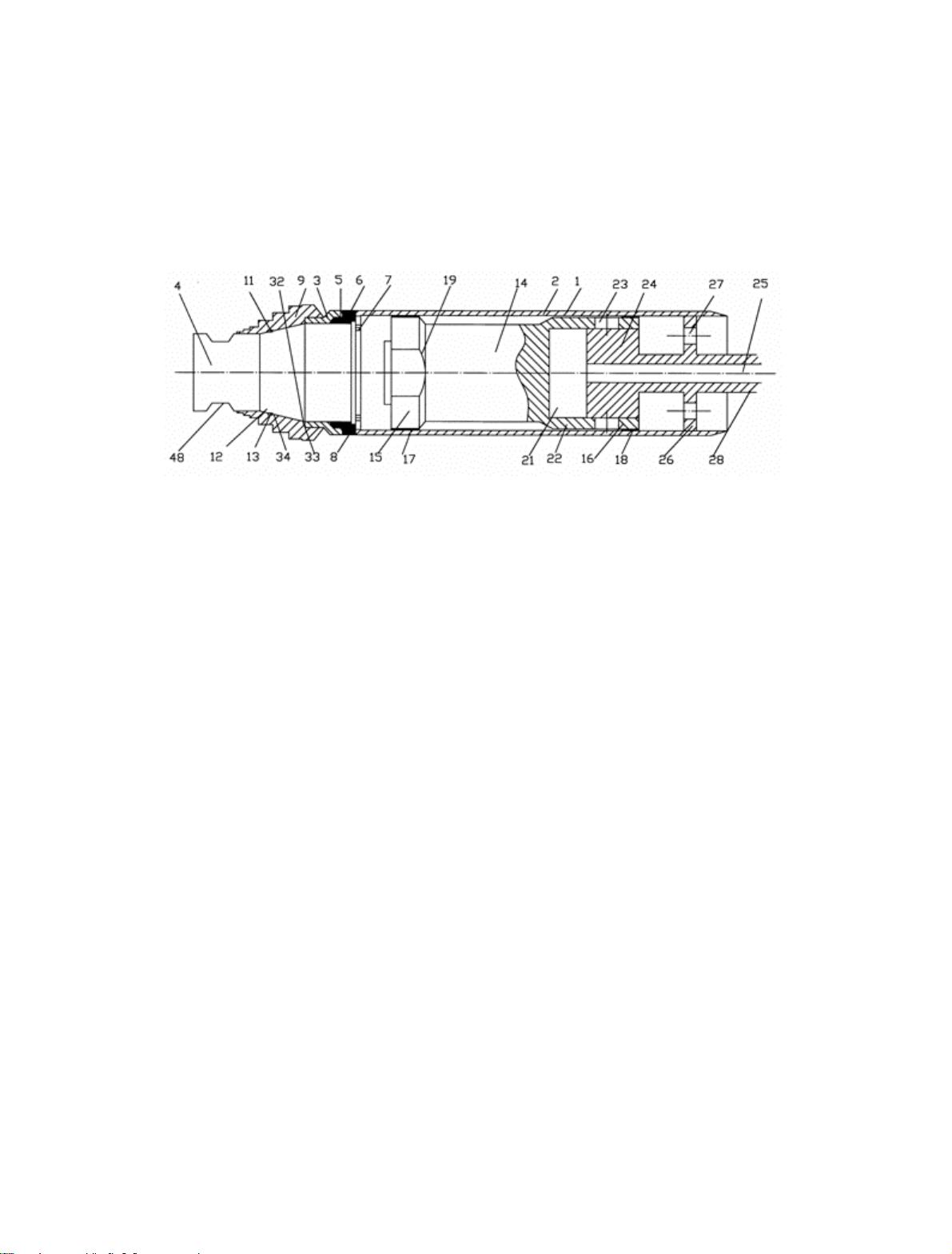
首先,文章概述了国内外水下机器人与拱泥机器人的发展历史和未来趋势,强调了拱泥机器人在物理样机设计和工作原理上的创新。为了理解机器人的运动行为,作者进行了运动学和动力学的研究,构建了三维运动学模型,并通过MATLAB进行仿真验证,以分析机器人在水下泥土环境中的受力状态。
接着,文章深入到关键组件——气动冲击器的建模与仿真。利用MATLAB的Stateflow工具,对气动冲击器的复杂控制逻辑进行建模和仿真,揭示了其参数对系统性能的影响,为冲击器的优化设计提供依据。
考虑到拱泥机器人在实际作业中面临的不确定性,如环境参数变化、非线性特性及外部扰动,文章采用了参数自调整模糊控制策略。设计了模糊控制器来改善机器人转向行走时的性能,并对拱泥头的动力学模型进行了仿真,为结构设计和部件选择提供了指导。
此外,MATLAB作为一种强大的开发语言,在整个研究中起到了核心作用。MATLAB不仅被用来进行运动学和动力学建模,还用于处理复杂控制逻辑和模糊控制设计,体现了其在虚拟样机技术和计算机辅助设计中的广泛应用。
全文结构清晰,从水下机器人的背景介绍到拱泥机器人的具体研究,再到MATLAB在仿真中的应用,层层深入,为后续的工程样机研制提供了理论和技术支持。关键词包括拱泥机器人、仿真、MATLAB,表明了研究的核心内容。

- 9 -
了拱泥机器人在泥土中受力情况,在此基础上用 Routh 方程建立了拱泥机器人
的动力学方程。
建立拱泥机器人气动冲击器模型,利用 MATLAB/Simulink 软件及其组件
Stateflow 对拱泥机器人冲击器模型进行动态仿真,并分析冲击机构各项参数对
输出性能的影响。
建立拱泥机器人头部冲击时的位置控制系统模型,并进行动态仿真,加入
了模糊控制,并对头部的动力学模型进行动态仿真。

剩余70页未读,继续阅读
2023-10-30 上传
158 浏览量
点击了解资源详情
2024-05-05 上传
1674 浏览量
542 浏览量
175 浏览量
362 浏览量
2021-06-29 上传

「已注销」
- 粉丝: 846
- 资源: 3601
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows编程之API函数大全
- 89s51 好程序 各种
- TOGAF-tutorial-presentation
- 89s51数字钟 程序
- GCC 中文用户手册
- mobile phone
- The Implement of Remote Control Software by using Java
- 自己整理的websphere portal主题皮肤开发资料
- websphere portal6.1主题皮肤开发资料
- VB入门实用教程(全)
- VMware Workstation使用手册
- 计算机专业英语教材计算机专业英语教材
- 000-960 的资料
- Flash读取数据库技术4
- Flash读取数据库技术3
- Flash读取数据库技术2
