PID控制原理与数字PID算法解析
需积分: 10 121 浏览量
更新于2024-08-27
收藏 256KB PDF 举报
"PID控制及其应用.pdf"
PID控制是一种广泛应用的闭环控制策略,它结合了比例(P)、积分(I)和微分(D)三个控制元素,以改善系统的响应性能和稳定性。这种控制方法最早起源于模拟控制系统,现在广泛应用于数字控制系统,尤其是在FPGA(Field-Programmable Gate Array)等硬件平台上实现。
在PID控制中,比例项(P)对当前偏差做出即时反应,它的输出与偏差成正比,可以快速调整控制量以减小偏差。积分项(I)则关注偏差的累计,随着时间的推移,积分作用会消除静态误差,提高系统的无差度。积分时间常数(Ti)决定了积分作用的强度,较大的Ti会使积分作用较弱,而较小的Ti则会增强积分效果。微分项(D)则是基于偏差变化率的预测,它能提前对系统进行调整,以减少调节时间和提高响应速度。微分时间常数(Td)决定了微分作用的敏感度。
在模拟PID控制系统中,这三个参数(Kp、Ti、Td)可以通过调整硬件电路的元件值来设定。而在数字PID控制中,这些参数通常在软件中配置。数字PID有两种主要形式:位置式和增量式。位置式PID算法的输出直接反映了执行机构的位置,可能对干扰敏感。相比之下,增量式PID仅计算控制增量,常用于电机控制,因为它能更好地平滑输出并减少响应中的振荡。
增量式PID算法的计算公式如下:
△u(k)=Kp△e(k)+Kie(k)+Kd[△e(k)-△e(k-1)]
△e(k)=e(k)–e(k-1)
△e(k-1)=e(k-1)–e(k-2)
e(k)=r(k)–c(k)
其中,Kp是比例系数,Ki是积分系数,Kd是微分系数,r(k)是期望速度给定值,c(k)是实际速度输出值,e(k)是当前采样时刻的偏差,而△e(k)和△e(k-1)分别表示当前和前一次采样的偏差变化量。通过不断更新这些变量,增量式PID能够动态调整控制量以接近设定值。
在实际应用中,PID参数的整定是一个关键步骤,需要根据系统的特性和控制要求进行调试。通常,这包括了阶跃响应分析、Ziegler-Nichols法则、自适应控制或其他高级优化算法。FPGA由于其灵活性和并行处理能力,成为实现高效、实时PID控制的理想平台,允许快速原型设计和定制化控制算法。
PID控制是自动化和控制系统中的基石,其基本原理和实现方法已经深入人心。无论是在传统的工业设备还是现代的智能系统中,PID控制都发挥着至关重要的作用,确保系统能够准确、稳定地达到预定的目标。
1. 简介
PID 控制指的是一种闭环控制方式,将输入输出偏差的比例(P)、积分(I)和微分(D)
通过线性组合构成控制量,对被控制对象进行控制。
2. PID 控制原理
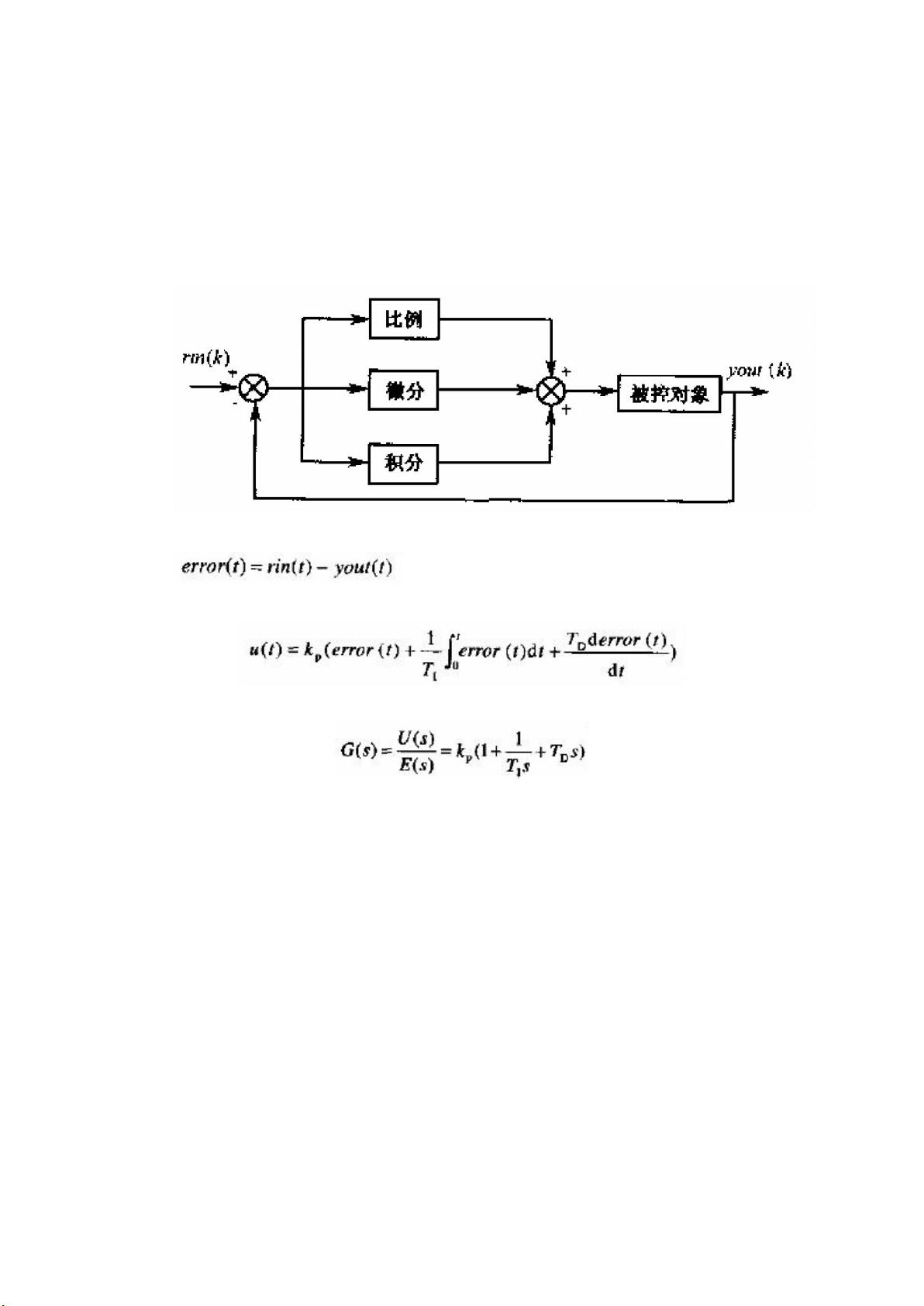
在模拟控制系统中,控制器最常用的控制规律是 PID 控制。模拟 PID 控制系统原理框
图如图 1-1 所示。系统由模拟 PID 控制器和被控对象组成。
PID 控制器是一种线性控制器,它根据给定值 rin(t)与实际输出值 yout(t)构成控制偏差
PID 的控制规律为
或写成传递函数的形式
式中,Kp---比例系数;Ti--积分时间常数;Td---微分时间常数。
简单说来,PID 控制器各校正环节的作用如下:
(1)比例环节:成比例地反映控制系统的偏差信号 error(t),偏差一旦产生,控制器立即产生
控制作用,以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间
常数 TI,TI 越大,积分作用越弱,反之则越强。
(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在
系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
3. 数字 PID 算法原理
在计算控制系统中,使用的是数字 PID 控制器,数字 PID 控制算法通常又分为位置式 PID
控制算法和增量式 PID 控制算法。
位置式算法输出的是执行机构的实际位置,如有干扰的话,会导致大幅度变化。
而增量式 PID 是指数字控制器的输出只是控制量的增量,所以电机控制一般都采用增量式
PID 算法。
增量式 PID 算法公式:
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
1558 浏览量
109 浏览量
2021-09-05 上传
2021-09-09 上传
117 浏览量

weixin_38744153
- 粉丝: 348
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 微机接口技术及其应用课后习题答案
- Windows网络基本测试手段
- struts_2_design_and_programming_a_tutorial_2nd.7142682776
- vc++算法示例10个饿
- IBM Portal
- 《C++Builder6.0界面开发实例》
- Domino故障分析及处理方法
- JSP详细开发环境的配置
- Advanced UNIX Programming .pdf
- MyEclipse 6 Java EE 开发中文手册
- 基于MC56F8013的无刷直流电机调速控制器设计
- c++builder 实例精讲
- WCDMA核心网技术
- dos入门教程,基础篇
- 华南理工2007研究生入学考试试卷
- pl/sql学习文档
