基于融合函数的直线柔性倒立摆模糊控制算法
需积分: 9 117 浏览量
更新于2024-08-12
收藏 925KB PDF 举报
"柔性倒立摆的模糊控制算法 (2010年) - 针对直线柔性一级倒立摆的多变量特性,提出了一种基于融合函数的模糊控制算法,通过最优控制理论解决规则爆炸问题,减少输入变量维数。"
在控制理论领域,倒立摆是一个经典的控制难题,尤其当涉及到具有柔性的关节时,其动态行为变得更加复杂。直线柔性一级倒立摆是一种特殊的倒立摆,其摆杆不仅存在刚性运动,还包含柔性振动,这使得系统的多变量特性更加突出。控制这种系统需要精细的设计和复杂的策略。
模糊控制是一种基于模糊逻辑的控制方法,它能够处理非线性、不确定性和多变量系统。然而,传统的模糊控制规则库可能导致“规则爆炸”问题,即随着系统复杂度的增加,需要制定的模糊规则数量急剧增长,这会增加设计难度和计算负担。
论文提出的解决方案是引入融合函数来解决这个问题。融合函数可以将多个输入变量综合成一个或少数几个关键变量,从而简化模糊控制器的结构。通过最优控制理论,计算出能确保系统稳定性的反馈增益矩阵,这个矩阵用于构建融合函数。这样,不仅可以降低输入变量的维度,还能保持控制器的性能。
最优控制理论是控制工程中的一个重要工具,它寻求找到使系统性能指标(如稳定性、响应速度等)达到最优的控制策略。在这里,最优控制理论被用来计算反馈增益矩阵,确保系统在模糊控制下的稳定性。
实际的仿真和实验验证了所提方法的有效性和正确性。仿真结果通常会展示系统在不同条件下的响应,比较不同的控制策略,以证明新方法的优势。而实验结果则直接在物理系统上进行测试,进一步证明了理论设计的可行性。
这篇论文为解决直线柔性一级倒立摆的控制问题提供了一个创新的模糊控制方法,通过融合函数和最优控制理论,成功地简化了控制系统的复杂性,并在实践中得到了验证。这一研究对于理解和改进其他具有类似复杂性的控制问题具有重要的参考价值。
第 卷第 期
智能系统学报
Vol
年 月
CAAI Transactions on Intelligent Systems
Aug
doi jissn
柔 性 倒 立 摆 的 模 糊 控 制 算 法
赵潇菲张井岗
太原科技大学 电子信息工程学院山西 太原
摘要针对直线柔性一级倒立摆多变量的特性提出了基于融合函数的模糊控制算法解决了 规则爆炸问题利
用最优控制理论计算出使系统稳定的反馈增益矩阵由反馈增益矩阵构造融合函数由此减少了模糊控制器的输入
变量维数仿真和实际实验结果证明该方案的有效性和正确性
关键词直线柔性一级倒立摆模糊控制器融合函数模糊规则
中图分类号TP 文献标识码A文章编号
A fuzzy control method for flexiblejoint inverted pendulums
ZHAO Xiaofei ZHANG Jinggang
School of Electronics Information Engineering Taiyuan University of Science and Technology Taiyuan China
AbstractModeling of a linear singlestage flexiblejoint inverted pendulum involves multiple interacting variables
A novel fuzzy control method was proposed that would solve the rule explosion problem by applying a fusion func
tionThe feedback gain matrix which makes the system stable was calculated using optimal control theoryThen
the fusion function was constructed with a feedback gain matrix which reduced the dimensions of variables passed to
the fuzzy controllerSimulations and practical experiments were conductedThe results showed the validity and cor
rectness of the method
Keywordslinear singlestage flexiblejoint inverted pendulum fuzzy controller fusion function fuzzy rule
收稿日期
通信作者赵潇菲Emailfeinacom
倒立摆是一个非线性强耦合不稳定的控制对
象通常被作为典型的实验控制对象来验证各种控制
方法受到世界各国许多科学家的青睐模糊控制属于
智能控制范畴它是一种非线性控制在过程控制领域
发挥着重要的作用然而模糊控制在实际应用中也存
在一定的局限性规则爆炸就是其中的一个难题为
解决这个问题张乃尧等
针对一级倒立摆提出过双
闭环模糊控制方案内环控制摆杆角度外环控制小车
位移范醒哲等
人将此方法推广到三级倒立摆系统
中并提出 种模糊串级控制方案而本文所研究的直
线柔性一级倒立摆系统是一种新型的更加复杂且难以
控制的非线性多变量不稳定系统它是在直线倒立摆
的基础上引入了自由震荡环节自由弹簧系统控制涉
及到的状态变量共有 个如果每个变量的论域作
个模糊集的模糊划分这样完备的推理规则库会包含
个推理规则要建立一个完善的控制规则很
难本文以直线柔性一级倒立摆为控制对象研究了基
于融合函数的模糊控制算法
成功地解决了规则爆
炸问题
系统建模
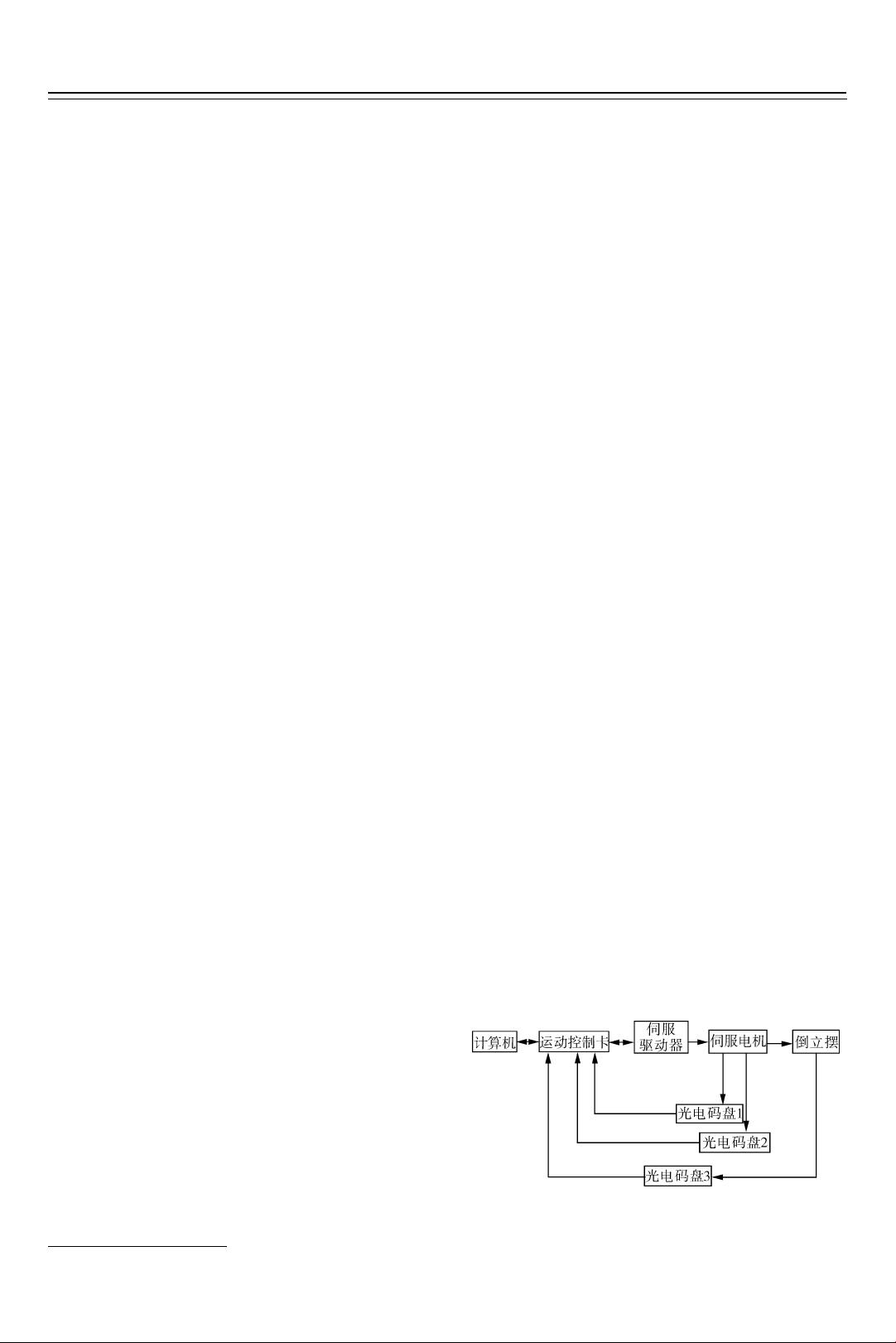
柔性倒立摆控制平台是由普通 PC 机柔性倒
立摆本体电控箱以及运动控制卡等部分组成的系
统框图如图 所示
图 直线一级柔性连接倒立摆系统
FigLinear stage flexiblejoint inverted pendulum system
在忽略各种磨擦空气阻力后可将柔性一级倒
立摆系统抽象成由弹簧匀质摆杆小车和质量块组
下载后可阅读完整内容,剩余5页未读,立即下载
MATLAB仿真控制一级倒立摆系统的挑战与实现,MATLAB仿真控制一级倒立摆系统的挑战与实现,MATLAB的一级倒立摆控制仿真 ,MATLAB; 一级倒立摆; 控制仿真; 倒立摆控制算法; 仿真结果
2025-02-18 上传
121 浏览量
点击了解资源详情
114 浏览量
316 浏览量
2021-09-21 上传
2022-07-05 上传
2022-07-02 上传
2022-07-02 上传

weixin_38610657
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
