Matlab 实验三:人脸去斑与美白技术应用
在本次实验中,我们探讨了如何利用MATLAB进行人脸图像处理,主要关注两个关键任务:去除人脸图像中的雀斑和人脸美白。这个实验旨在让学生深入理解图像处理在实际问题中的应用,特别是通过以下知识点:
1. 实验内容:
- 去除人脸雀斑:表面模糊是一种方法,它与传统的模糊技术不同,表面模糊针对每个像素建立独特的模板矩阵,计算公式中使用绝对差值来确定权重。这种方法的时间复杂度较高,O(m*n*(2r+1)²),但通过预计算权重表和针对彩色图像的不同处理策略(单通道扩展或分通道并行处理)可以显著提高效率。
2. 实验目的:
- 综合运用知识:实验要求学生将颜色空间理论、滤波技术(如表面模糊和双边滤波)以及图像修复技术(ImageInpainting)结合起来解决问题。
- 颜色空间与滤波:了解RGB或其他颜色空间在图像处理中的作用,以及如何选择合适的滤波方法以保持边缘信息(双边滤波)和去除噪声。
- 图像修复:了解在去除非重要细节的同时,如何保持图像结构完整性和视觉连续性的技术。
3. 实验设计:
- 表面模糊算法优化:通过分析权重计算过程,预计算权重表以减少计算负担,并考虑使用并行处理来减少内存占用。
- 双边滤波:这是一种非线性滤波器,强调边缘保留和噪声抑制,利用高斯分布的加权平均来更新像素值。
4. 可选加速策略:
- 图像量化:通过将图像色彩深度降低(例如从256色阶变为128或64色阶),虽然牺牲部分细节,但能显著加快处理速度。
- 性能优化:在时间和资源有限的情况下,实验者可以选择对算法进行更多优化,如进一步的并行化或使用更高效的图像处理库。
这个实验不仅提供了实践图像处理技术的机会,还锻炼了学生的问题解决能力,让他们理解了在实际应用中如何根据需求选择合适的技术和优化策略来提升图像处理效率。通过这个过程,他们能够加深对MATLAB编程、图像处理理论和实践的理解。
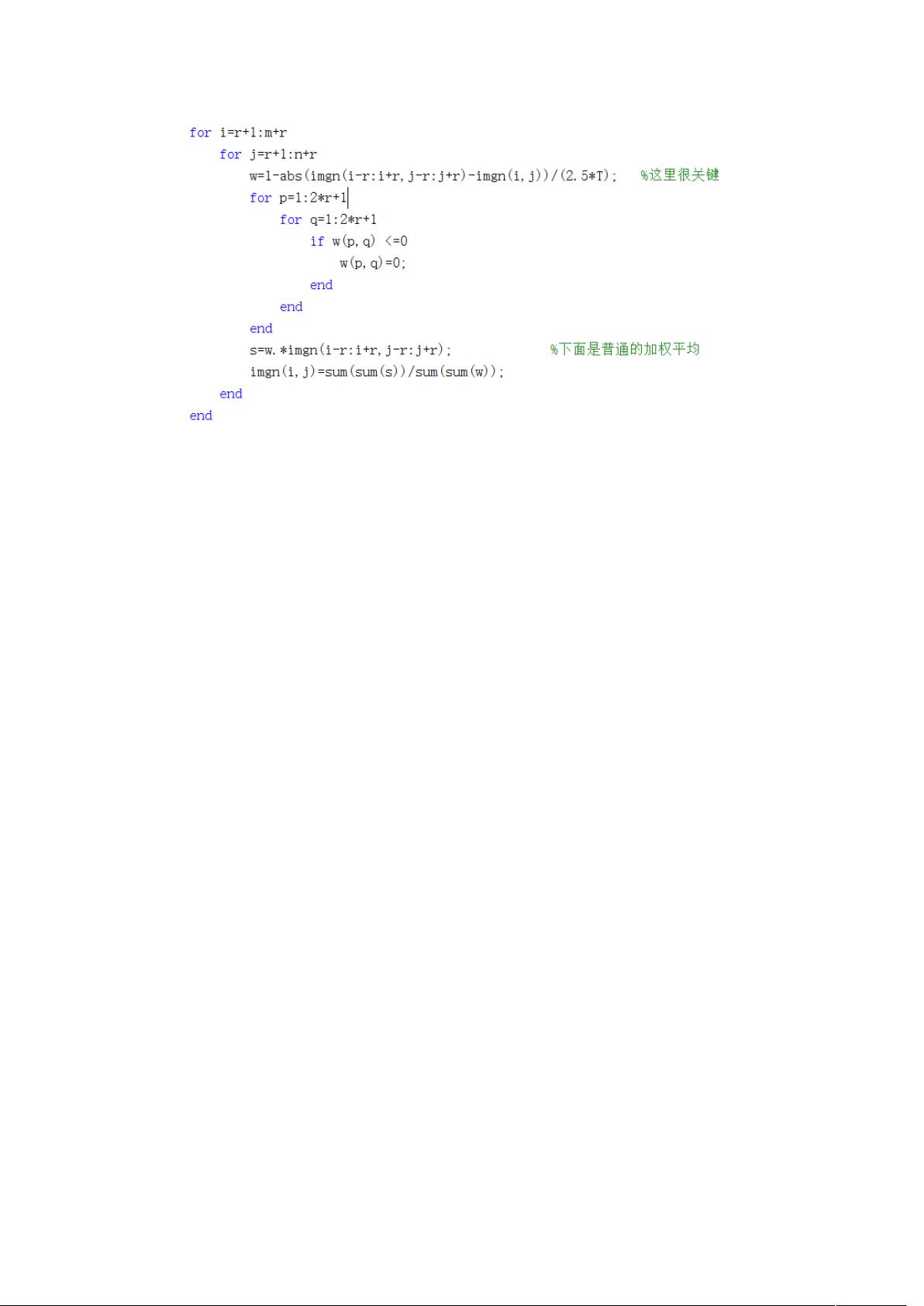
图 2.算法实现的主要代码
算法时间复杂度:O(m*n*(2r+1)
2
)
算法的改进:分析计算方法 1,很明显权重计算的几个加减乘除以及下面的那句判
断是比较耗时的,而其只是 Y-Value 的一个函数,因此,我们可以提前建立一个表,
该表的索引范围从 Min[Y - Value]到 Max[Y - Value]之间,很明显,这个范围是[-255,
255],因此,建立一个查找表。
对于彩色图像,一种做法就是直接扩展现在单通道的代码,让其支持三通道,另
外一个办法就是把图像先拆分成 3 通道独立的数据,然后没通道独立处理,处理完成
后再合成,这样做有两个好处,第一是代码复用;第二就是如果支持 Openmp 或者其
他的并行库,可以让 3 通道并行起来执行。但是也有 2 个不足,第一是内存占用会增
加很多,因为这种算法是不支持 In-Place 操作的,所以必须分配 6 份单通道的数据,
而算法内部分配的内存由于并行的关系也要增加一些(不是三倍),及时考虑到可以
把其中三个通道的数放置到 Dest 中,也会增加 3 份通道的数据。
针对实际的应用,一种可选的进一步加速的方式就是把图像的色阶范围进一步缩
小,比如由 256 色阶变为 128 或者 64 色阶,这样理论上还可以在快 2 倍到 4 倍,不过
效果会稍有下降,一般 128 位时还是可以接受的。
这里可以提升 10 倍左右速度,由于时间限制,暂时不做更多的研究和实现。
1.2 尝试 2:双边滤波
双边滤波是一种非线性滤波器,它可以达到保持边缘、降噪平滑的效果。和其他
滤波原理一样,双边滤波也是采用加权平均的方法,用周边像素亮度值的加权平均代
表某个像素的强度,所用的加权平均基于高斯分布。最重要的是,双边滤波的权重不
仅考虑了像素的欧氏距离(如普通的高斯低通滤波,只考虑了位置对中心像素的影
响),还考虑了像素范围域中的辐射差异(例如卷积核中像素与中心像素之间相似程
度、颜色强度,深度距离等),在计算中心像素的时候同时考虑这两个权重。
公式 1a,1b 给出了双边滤过的操作,Iq 为输入图像,Ipbf 为滤波后图像:
剩余13页未读,继续阅读
2021-05-19 上传
2021-05-19 上传
2023-05-30 上传
2024-09-20 上传
2024-09-20 上传
2023-04-27 上传
2023-04-27 上传
2021-09-10 上传

甜甜圈SweetDonut
- 粉丝: 627
- 资源: 38
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
