西门子PLC与华数机器人Modbus通讯配置指南
需积分: 31 175 浏览量
更新于2024-08-04
8
收藏 4.87MB DOCX 举报
"西门子PLC1200/1500与华数机器人的Modbus通讯涉及西门子PLC作为主站通过Modbus协议与华数机器人作为从站建立连接,实现数据交互。在博途软件中创建项目并设置PLC的IP地址,确保与机器人在同一网段但不冲突。启用PLC的系统和时钟存储器。在编程中使用ModbusTCPClient功能块,配置连接参数,包括通信状态、接口ID、连接ID、是否为主站、伙伴端点IP地址和远程端口等。"
西门子PLC1200/1500与华数机器人之间的Modbus通讯是一个典型的过程控制系统中的工业通信案例。在这个过程中,西门子PLC扮演主站角色,控制和读取从站华数机器人的数据。为了实现这种通讯,需要进行以下几个关键步骤:
1. **项目创建与参数设置**:
- 首先,在西门子的TIA博途软件中创建一个新的项目,并选择相应的PLC型号(S7-1200或S7-1500),然后设置PLC的IP地址。确保PLC的IP与华数机器人的IP在同一网络段,但IP地址不能相同,以避免通信冲突。
2. **启用系统和时钟存储器**:
- 在PLC的配置中,启用系统和时钟存储器,这是Modbus通讯所必需的,以便PLC能正确处理数据交换。
3. **ModbusTCPClient的配置**:
- 在编程环境中,添加MB_CLIENT功能块,这将用于实现TCP连接。
- 配置连接参数,如`ModbusTCPConnect`,设置DONE、BUSY和ERROR变量来监控通信状态。
- 设定`InterfaceID`,通常可以从PLC的属性中找到硬件标识符。
- 设置`ID`,确保它是唯一的且不与其他连接冲突。
- 设置`ActiveEstablished`为TRUE,表明PLC作为主站发起连接。
- `Remote_Address`应填写华数机器人的IP地址。
- `RemotePort`和`Local_port`分别设置为机器人和PLC的端口号,根据机器人软件的设置来确定。
4. **机器人端的Modbus参数配置**:
- 在华数机器人的控制软件中,需要配置Modbus通讯参数,包括通讯方式(通常是TCP/IP)、IP地址和端口号,以匹配PLC的设置。
5. **编程逻辑**:
- 使用Modbus功能块编写PLC程序,定义读写请求,指定要访问的寄存器地址和数据类型。
6. **测试与调试**:
- 完成配置后,通过在线调试工具测试PLC与机器人的通讯,确保数据能够正确传输和解析。
通过以上步骤,西门子PLC可以成功地通过Modbus协议与华数机器人建立连接,实现诸如控制机器人动作、获取机器人状态等数据交互功能。这种方法在工业自动化中广泛应用,因为Modbus协议的简单性和广泛支持性,使得不同厂商的设备能够有效地协同工作。
西门子 S7-1200 与华数 III 型控制器 Modbus 通讯
二.ModbusTcpClient 的相关通讯参数的设置
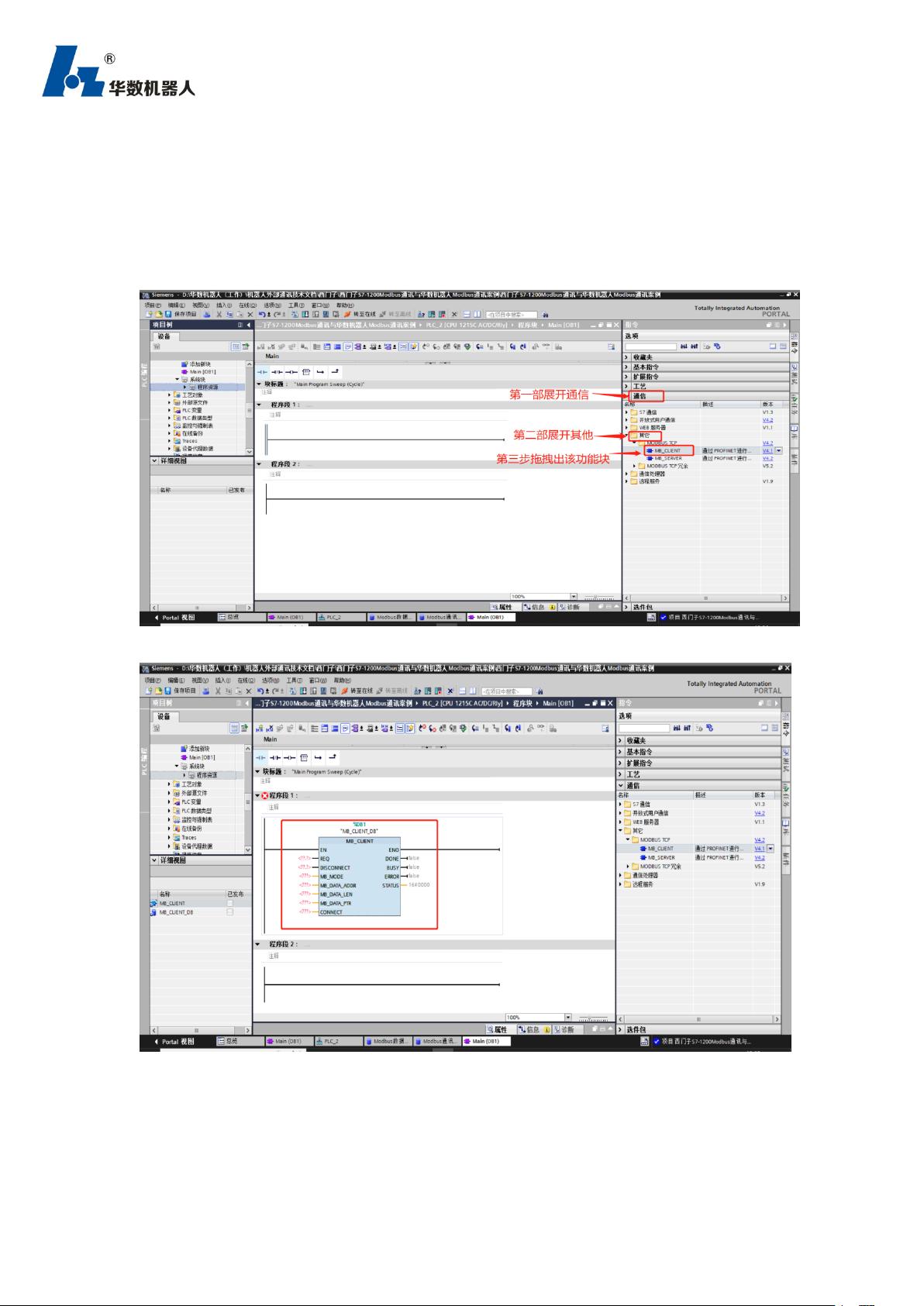
2.1,建立 Modbus 功能块
如图所示(图 2.2.1)(图 2.2.2),展开通信指令的选项展开其他的选项,展开 MODBUS_TCP 的指令选项,把 MB_CLIENT 的程序添加至程序段中
图 2.1.1
图 2.1.2
剩余11页未读,继续阅读
2024-11-04 上传
2024-11-04 上传
2023-05-16 上传
2023-09-14 上传
2022-06-30 上传
2022-09-13 上传
2021-08-14 上传
2021-08-14 上传

youngsheng
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Earth-satellite design_satellite_optisystem_光通信_自由光通信_Optisystem
- TwoMbit:主系统,游戏装备,sg-1000仿真-开源
- STM32H7R实现lwIP NETCONN-UDP实验【支持STM32H7R系列】
- AboutCode-3.0.0.dev2-py2.py3-none-any.whl.zip
- 1.7890393101789E+19,小波降噪matlab源码,matlab源码网站
- nitpick:NuPIC 的可视化库
- Learn-how-to-control-robots-using-Javascript-through-Cylon.js:关于javascript和CylonJS的研讨会
- fundMeATesla-源码.rar
- lorenz MATLAB,matlab源码字母,matlab源码下载
- 基于SpringMVC+jsp网上选课系统.zip
- pg-beershop:带有PostgreSQLCAP Beershop
- eclipse安装MyBatipse
- today:今天对于Trello
- Cloudmersive.APIClient.NodeJS.Example:将NodeJS客户端用于Cloudmersive API的示例
- constrained-extreme-learning-machine-master_回归_黄广斌主页_machinelear
- tadl-list-gallery:用于显示项目列表的 Wordpress 插件
