地磁导航智能小车转向控制策略研究
114 浏览量
更新于2024-08-31
1
收藏 436KB PDF 举报
"基于地磁导航的智能小车方向控制方法"
本文主要探讨了一种利用地磁导航技术对智能小车进行方向控制的策略。在智能系统中,地磁导航是一种有效的定位和导航手段,尤其在视觉和GPS导航存在局限性的场景下。通过地磁传感器,系统能够获取小车的行驶状态,包括位置、速度和方向等关键信息。地磁传感器的测量数据可以反映地球磁场的矢量特性,使得导航系统能够在没有外部能源输入的情况下持续工作。
在地磁导航中,一个关键环节是对地磁导航角进行误差校正。这涉及到对传感器数据的处理和分析,以消除由车辆运动、环境干扰或传感器自身误差导致的不确定性。为了适应Cortex_M4处理器的内核,文章提出了一种转向控制策略,该策略考虑了车辆的速度、转向角等因素,以确保智能小车能够在预定路径上准确行驶。
智能小车控制系统的设计包括硬件和软件两个方面。硬件部分主要包括地磁传感器、微控制器(如Cortex_M4)、舵机以及其他必要的电子组件。软件部分则涉及数据处理、导航算法的实现以及PID控制的运用。PID控制器能够根据航向角偏差动态调整舵机的角度,从而控制小车的方向。
在实际应用中,由于硬件平台的限制,可能需要对算法进行优化以提高性能和效率。文章提出了优化方案,并通过实验验证了其可行性,证明了基于地磁导航的智能小车控制系统在实际运行中的稳定性和准确性。
地磁导航的优势在于其无源、全天候、全地域的特点,不受天气条件和网络覆盖范围的影响。尽管如此,地磁导航也面临一些挑战,例如地磁异常、城市建筑物产生的磁干扰等问题,这些都需要在设计系统时进行充分的考虑和处理。
地磁导航技术为智能小车提供了可靠的自主导航解决方案,通过精确的控制策略和误差校正方法,能够实现智能小车的精准路径行驶。随着技术的进一步发展,这种导航技术有望在无人驾驶、物联网设备和自动化运输等领域得到更广泛的应用。
基于地磁导航的智能小车方向控制方法基于地磁导航的智能小车方向控制方法
讨论了一种通过地磁进行智能系统导航控制的方法,通过地磁传感器获得智能系统的行驶状态,并对地磁导航
角进行误差校正。综合考虑车辆速度、转向角大小等因素对智能系统行驶状态的影响,提出一种适用于内核为
Cortex_M4的智能小车转向控制策略。
郭鹏杰1,2,唐莉萍1,2
(1.东华大学 信息科学与技术学院,上海 201620;2.东华大学 数字化纺织服装技术教育部工程研究中心,上海
201620)
摘要摘要:讨论了一种通过地磁进行
关键词 关键词:地磁导航;智能系统;行驶状态;转向控制
0引言引言
21世纪,智能交通系统的飞速发展引发了智能导航技术的不断进步。机器视觉由于其具有检测范围广、信息容量大、类
似于人类驾驶决策且成本低廉等诸多优势,在国内外智能导航的研究中得到了广泛应用[1]。但是机器视觉是通过视觉识别
道路和障碍物,进而规划路径实现导航控制,控制结果容易受天气状况、光照等因素影响。全球定位系统(Global Positioning
System,GPS)是另一种广泛应用的导航技术,它可以为全球用户提供三维位置、速度等信息[2]。但是GPS导航具有一定
的局限性,它在使用时要求用户实时连接网络或者存储高精度的数字地图,否则其导航精度和实时性难以保证[3]。
地磁场是地球的固有资源,它能为航天、航海、航空提供天然的坐标系[3,4]。由于地磁场的矢量性,通过地磁传感
器感知测量即可确定系统当前的运动状态信息[5,6]。与其他导航方式相比,地磁导航具有无源、全天候、全地域、低能
耗等优势,在工业部门、航空航天等诸多领域发挥了重要作用,成为近年来智能导航学术界关注的对象[7]。
本文在参考文献[812]的基础上,对基于地磁传感器自动导航的智能小车控制方法进行探讨,结合系统硬件框图,对基
于地磁导航的控制策略进行研究,并采用PID控制导航。对通过地磁传感器获得的当前航向角度,判断其与目标角度的夹角的
偏差,给出转向角度指令,调节舵机,实现小车自动路径行驶。最后在研究的理论算法基础上,考虑硬件平台限制,给出优化
方案,并通过实践证明该优化方案的可行性。
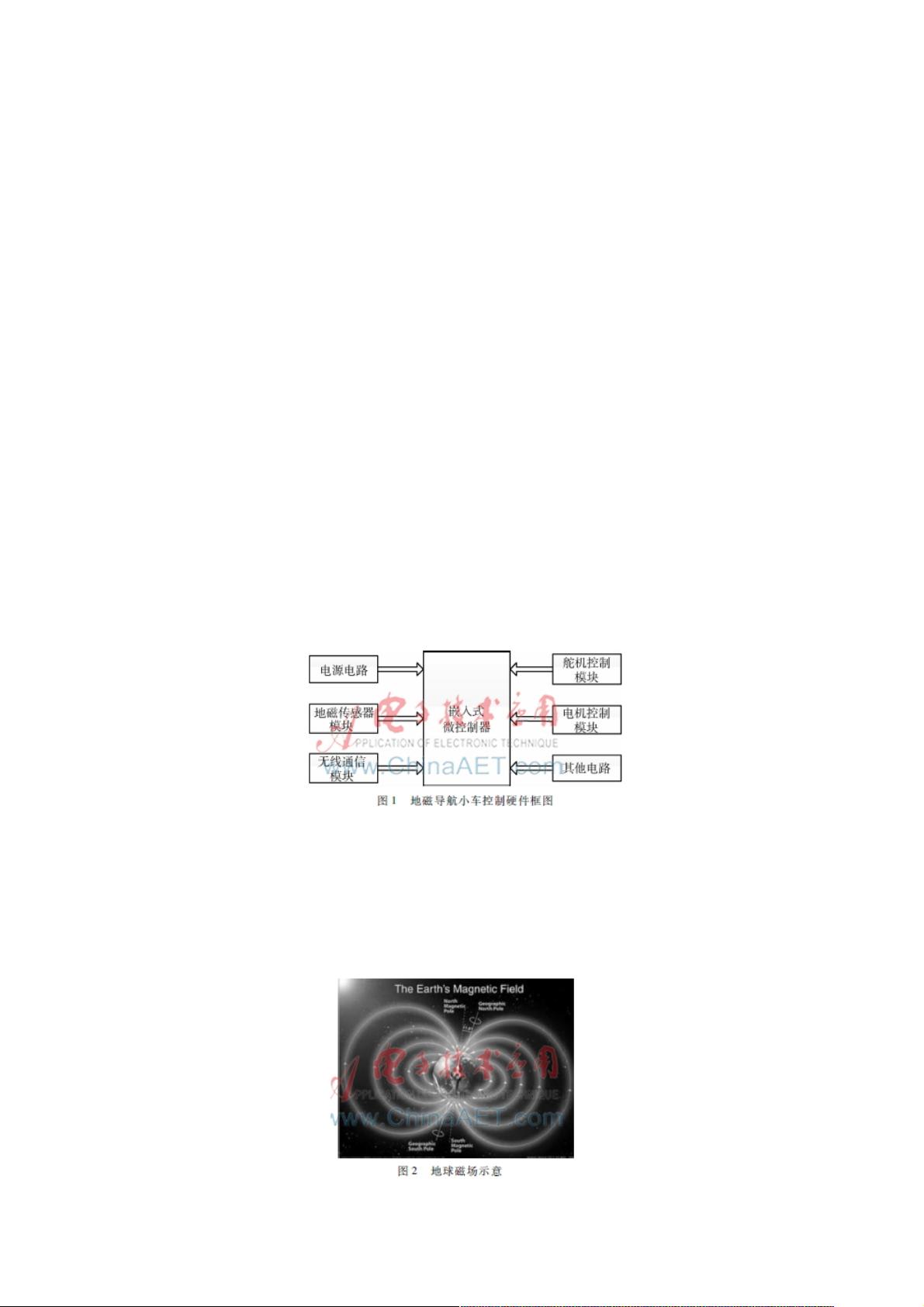
1系统设计总体方案系统设计总体方案
地磁导航小车在自动路径运动中不断通过地磁传感器获得当前行进方向的角度信息,与预设路径的航向角比较,通过所得
结果的偏差角度调整舵机的偏转方向,从而控制智能小车的行驶轨迹。系统的硬件主要模块如图1所示。其中地磁传感器采用
意法半导体公司的MEMS数字集成芯片LSM303DLHC。
2地磁导航角度计算地磁导航角度计算
图5系统控制流程地磁传感器只能提供当前所在区域的磁场量,要获取当前小车的导航角,必须计算地球磁场和导航角之
间的关系并进行标定。
地球的磁场总是由地磁南极指向地磁北极,在极点处磁场与当地水平面垂直,在赤道处与当地水平面平行,如图2所示。
对于地球上绝大部分区域来说,当地地磁场均可视为与水平面平行。由于地磁场是一个矢量,任意一点的地磁场都可以分解为
两个平行于当地水平面的分量和一个垂直于当地水平面的分量。如果保持地磁传感器和当地的水平面平行,那么就有图3所示
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2013-04-08 上传
2021-09-20 上传
2012-04-01 上传
2021-09-09 上传
2021-09-20 上传
2022-11-13 上传

weixin_38613548
- 粉丝: 4
- 资源: 934
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
