ENVI软件LiDAR插件:无缝集成与LAS文件处理指南
ENVI软件中的LiDAR插件是ITT Visual Information Solutions开发的一款强大的补充模块,专为ENVI基础包设计,用于处理、分析和利用由光探测和测距(LiDAR)和激光雷达(LaDAR)系统捕获的三维数据。这款工具在现代遥感领域扮演着关键角色,它支持多种LiDAR数据格式,并通过用户友好的界面将这些数据无缝集成到业界标准的数据处理环境中。
该插件的主要功能包括:
1. **数据导入与整合**:该插件允许用户方便地将各种类型的LiDAR数据导入ENVI软件,如LAS文件,这是LiDAR数据的标准格式,确保了数据的兼容性和高效处理。
2. **预处理与格式转换**:在第2部分的“Preprocessing/Formatting”章节中,文档详细介绍了如何对原始LiDAR数据进行预处理,如去噪、校准、平滑等步骤,以提高数据质量并使其适合后续的分析和可视化操作。
3. **数据处理与分析**:LiDAR插件提供了高级功能,如点云分类,这有助于识别和区分地面、建筑物、植被等不同地物类别,这对于地形建模、城市规划和灾害管理等领域至关重要。
4. **可视化工具**:用户可以通过直观的界面直观地查看和探索三维数据,这有助于科研人员和决策者快速理解数据特征和发现潜在模式。
5. **无缝集成**:由于其设计目标是与ENVI软件的基础包无缝结合,用户无需学习新的软件或工作流程,可以直接利用ENVI的现有功能进行高级数据分析。
6. **版权与支持**:文档还强调了版权信息和联系信息,表明ITT Visual Information Solutions提供技术支持和持续的更新服务。
ENVI LiDAR插件为ENVI软件用户提供了强大的LiDAR数据处理和分析平台,提升了遥感数据的利用率,简化了工作流程,并促进了地理空间产品的生成和高级分析解决方案的实现。无论是专业研究还是商业应用,这款插件都是一大利器。
ITT Visual Information Solutions • 4990 Pearl East Circle Boulder, CO 80301 • Ph: 303.786.9900 • Fax: 303.786.9909
4
under the main drop-down menu (LiDAR→Convert ASCII to LAS). Through
experience working with multiple data sets, we have seen some data providers are more
thorough than others with their cataloging of the pieces of information collected by the
LiDAR sensor. All of the information available in the ASCII file (x, y, z, intensity,
return number, etc.) will be included in the resultant .LAS file. In scenarios where values
such as intensity and/or return number are not provided, the resultant .LAS file simply
will populate that field with a default value of ‘0’. While we cannot claim to have
accommodated for every scenario in which a data provider may deliver their data, we
believe to have developed a robust conversion tool that can ingest a variety of ASCII data
sets that have varying degrees of completeness.
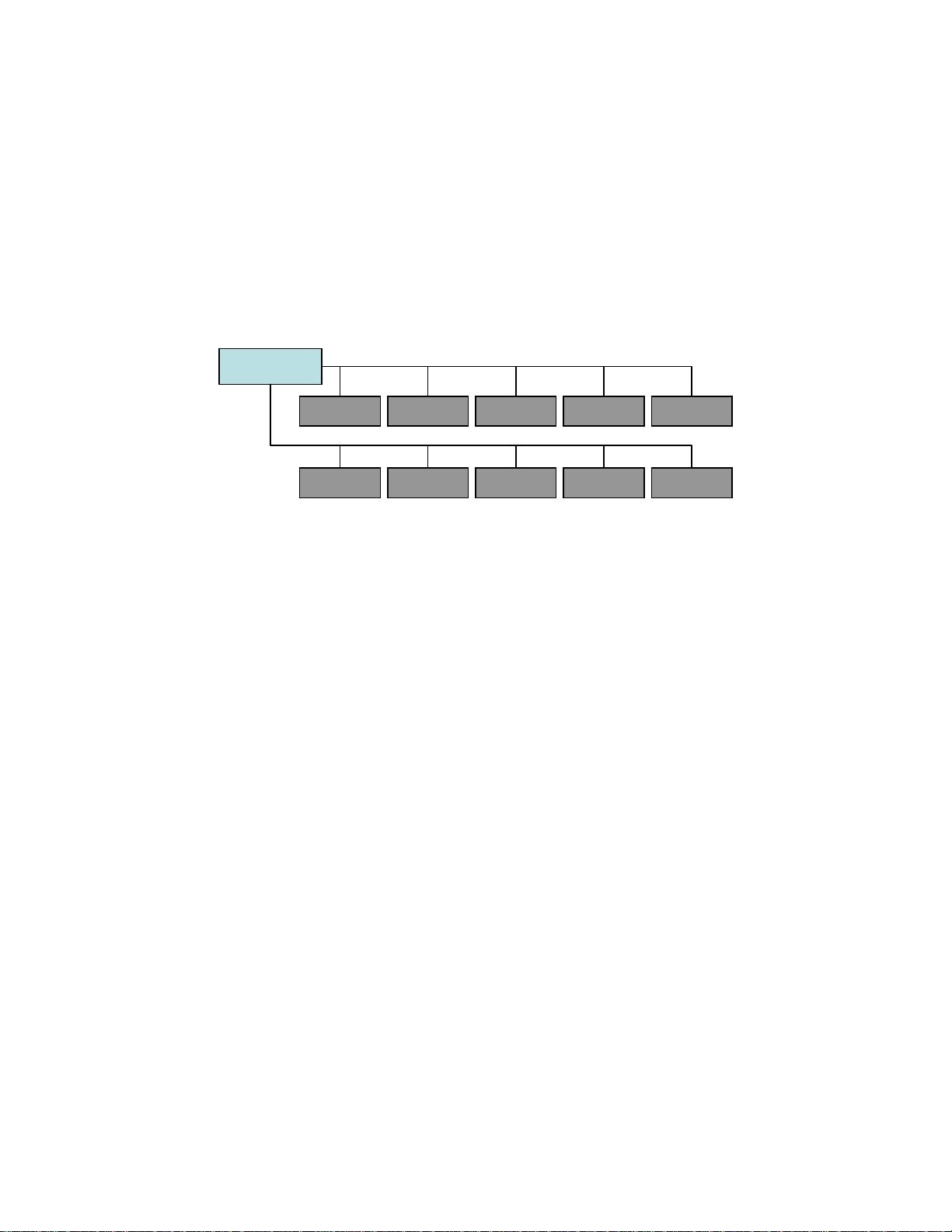
Figure 1: Graphical representation of a single point data structure in .LAS format
3. Geographic Processing
Users of LiDAR data often have widely varied goals in mind. Some users are
focused on the three dimensional characteristics of a single feature or object in their data
set. Other users are interested in developing products that describe broad geographic
terrain features, such as digital elevation models. Based on these needs, some users only
want to work with a small geographic subset of the original data that is collected, while
other users require the ability to work with multiple data sets at once. The ITT Visual
Information Solutions LiDAR Toolkit provides functionality to perform a variety of
geographic processing routines to assist in the derivation of a LiDAR data set that allows
users to develop their output products in a more efficient fashion. These geographic
processing routines include decimation, tiling, subsetting and merge operations that each
can be used to create a modified 3-D data set in .LAS format for a more focused analysis.
3.1 Decimating
Decimating a LiDAR point cloud refers to the ability to create a reduced
resolution data set. When a decimation operation is performed, a new point cloud is
created that essentially covers the same geographic region, but less points are used to
describe the materials contained within the geographic region. This method can be
implemented when a user does not want or need all of the original information captured
by the LiDAR sensor. Figure 2 illustrates the interface used to develop a new .LAS file
utilizing the decimate routine. A user can declare the number of points that will be
contained within the output data set. The Decimation tool will randomly select the
number of points provided by the user from the original data set to create the decimated
product. The only requirement on the number of points declared is that it must be some
number less than the number of point contained within the original data set.
Point
Easting Source
User Time Intensity
Return
Class
Elevation
Angle
Northing
剩余18页未读,继续阅读
2018-06-17 上传
2016-03-16 上传
2013-05-04 上传
2015-05-06 上传
2021-12-26 上传
2013-04-02 上传
2022-09-14 上传
点击了解资源详情









