USTButterfly-II: 仿生蝴蝶机器人的质量转移转向与飞行特性分析
10 浏览量
更新于2024-06-18
收藏 1.67MB PDF 举报
"该研究专注于仿生蝴蝶机器人的开发,特别是通过质量移动机构实现无尾控制的USTButterfly-II机器人。研究人员使用光学跟踪设备,如多摄像机运动捕捉系统,来测量和分析机器蝴蝶的机翼运动学、运动轨迹,以及相关的气动参数,如瞬时净升力系数和推力系数。这一工作旨在为仿生飞行器的设计优化提供实验数据,并增进对生物蝴蝶飞行机制的理解。"
文章指出,仿生飞行机器人,尤其是模仿蝴蝶的机器人,能够揭示昆虫飞行的秘密,这些秘密在传统固定翼和旋转翼飞行器中是无法观察到的。蝴蝶的飞行机制依赖于非定常空气动力学,其独特的前缘涡流和扑翼策略能显著提升飞行效率。尽管已有研究探索了这些机制,但定量分析蝴蝶飞行的细节仍然是一个挑战。
为了克服这一挑战,研究团队设计了USTButterfly-II,一个配备了质量移动机构的仿生蝴蝶机器人,用于模拟蝴蝶的无尾转向。这种创新的控制方法使得机器人能够在不依赖传统尾翼的情况下实现转向。通过多摄像机运动捕捉系统,他们能够精确地测量机器蝴蝶的翅膀运动,从而获取其飞行过程中的关键数据。
光学跟踪技术的应用使得研究人员能够捕捉到蝴蝶飞行的复杂动态,包括翅膀的运动轨迹和飞行姿态。这些数据对于理解蝴蝶的飞行机理至关重要,因为它们提供了定量的空气动力学参数,比如瞬时净升力系数和推力系数,这些参数在传统的活体观察或计算机模拟中很难准确获取。
尽管现有的活体观察和计算流体动力学模拟为理解蝴蝶飞行提供了部分见解,但它们各自存在局限性。活体观察往往难以捕捉到蝴蝶飞行的全貌,而计算机模拟则可能无法完全复现真实的飞行情况。因此,结合实际机器人实验的数据,如USTButterfly-II的测试结果,可以更全面地解析蝴蝶飞行的秘密。
这项研究不仅推进了仿生飞行机器人的技术发展,也为生物学家深入研究蝴蝶飞行机制提供了宝贵的实验平台。未来的工作可能会进一步优化这种仿生设计,以便更好地复制蝴蝶的飞行技巧,甚至可能启发新的航空工程解决方案。
H.
黄,
W.
他,
Z
。
Chen
等人
仿生智能与机器人
2
(
2022
)
100076
()
(
,
,
)
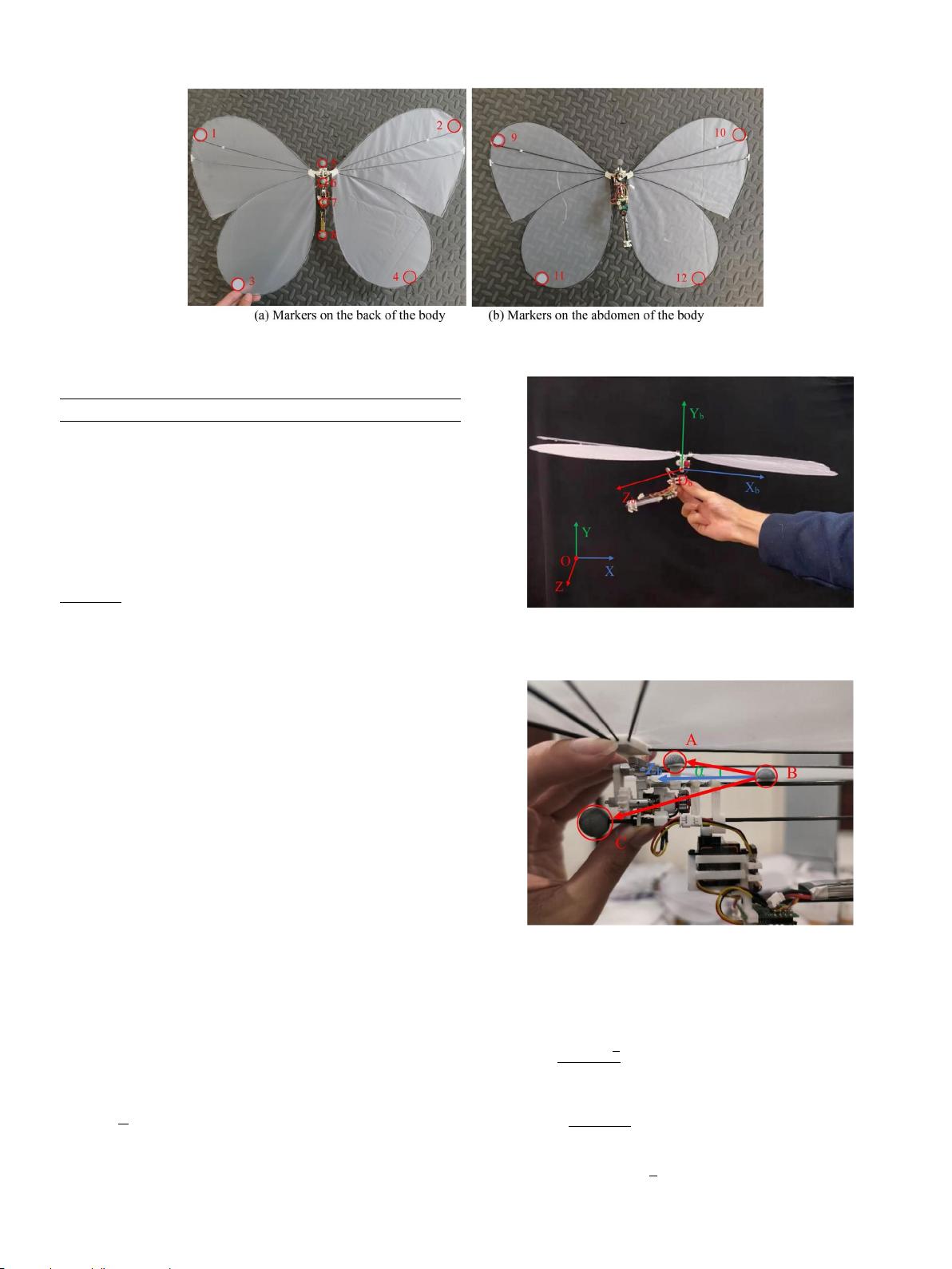
见图
8
。
标记红色圆圈中的位置。
表
1
标记的属性
标记
直径尺寸,
类型
圆形贴纸
圆形贴纸
圆形贴纸
圆形贴纸
球体
个半球体
个半球体
球体
圆形贴纸
圆形贴纸
圆形贴纸
圆形贴纸
计算前翅和后翅。此外,攻角,升力,推力,以及它们各自的系数进行
了计算。最后,定义并计算上升角来衡量爬升效率,定义并计算推进比
和飞行速度来衡量推进效率。
如图、建立了以机器人质心为原点
的
纵轴垂直于身体的对称平面
并指向右侧,纵轴垂直于纵轴并指向上方。
位于物体的对称平面内,
与
和
形成一个右直角坐标系。 运动捕捉系统可以提供反射标记在地面坐
标系中的空间坐标,如图的左下角所示。第九章
3.2.1.
姿态角
在计算姿态角之前,需要确定车体坐标系各轴在地面坐标系中的实
时坐标。如图所示,使用三个标记计算
三
个
标记、和都位于平面内。
和
之间的交叉
角
为
和
。
图第九章
建立人体坐标系和地面坐标系。
图10.
用于计算实体坐标系的参考标记。
此外,由于 轴垂直于平面 指向
由于
轴垂直于平面ABC,因此
轴
向量
为
。
假设长度
为
,
则
可以
通过
以下
等式确定
向上,轴的矢量
为
:
此外,桨距角可以如下确定
个
⋅
≥)
⋅
,(
)
≥)
中国
(
)
剩余23页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
