Windows上PX4-Pixhawk程序编译与Eclipse配置教程
需积分: 15 96 浏览量
更新于2024-07-06
1
收藏 1.53MB DOCX 举报
本篇笔记详细介绍了如何在Windows系统上搭建和配置PX4-Pixhawk程序的开发环境,以便进行软件开发和调试。以下是主要内容:
1. **编译环境准备**:
- 首先,确保您的电脑已经安装了Java运行环境,因为它是许多工具依赖的基础。
- 下载并安装PX4Toolchain,这是专门为Pixhawk开发设计的工具集合,可以从官方链接[http://pixhawk.org/dev/toolchain_installation_win](http://pixhawk.org/dev/toolchain_installation_win) 获取。
2. **安装过程**:
- 在安装时,通过PX4Toolchain的软件下载功能,会自动在C:\px4路径下下载以下文件夹:
- `px4`:包含了整个PX4 firmware库,包括MAVLink通信协议。
- `Firmware-PX4 firmware (for all modules)`:用于构建飞行控制器的各种模块。
- `NuttX`:一个嵌入式实时操作系统(RTOS),是Pixhawk的基础。
- `libopencm3`:可选的开源Cortex-Mx库,仅在引导加载器中使用。
- `Bootloader`:可选的引导加载器,一般情况下不需要手动处理。
3. **配置Eclipse集成开发环境**:
- 使用默认的安装选项启动PX4Eclipse,工作空间默认设置正确。
- 创建一个新的Makefile项目,选择Cross GCC编译器,并将项目文件夹定位到"C:\px4\Firmware"。
- 配置Make Targets,包括:
- `archives`:构建NuttX操作系统。
- `all`:构建整个自动驾驶仪软件,依赖于archives目标。
- `distclean`:清除所有构建文件,包括NuttX构建。
- `clean`:仅清理应用程序部分(即自动驾驶仪软件)。
- `uploadpx4fmu-v1_default` 和 `uploadpx4fmu-v2_default`:分别用于将编译后的软件上传到PX4FMU v1.x和v2.x开发板。
4. **编译方法**:
- 要编译软件,按照官方文档[http://pixhawk.org/](http://pixhawk.org/) 中的指南操作,这通常涉及到执行特定的Make命令或者使用Eclipse中的构建工具。
这篇笔记提供了从零开始搭建和配置PX4-Pixhawk开发环境的详细步骤,包括安装必要的工具、配置开发环境以及编译流程,这对于想要在Pixhawk平台上进行无人机控制软件开发的工程师来说非常实用。
的功能,59@A 支持 5 这 $ 条启动参数,在 的 ' 启动脚
本中,使用 参数来进行初始化,其他 个参数分别用来进行 59@A 功能的
自检和列出 59@A 的当前状态。
在 ' 中使用 参数启动 59@A 后,59@A 会创建并初始化它的设备实例,
其中的实现大部分都在 )C 基类完成。这个过程类似于 J5 设备驱动中的
> 函数,或者 I内核的 C+;,通过 调用完成设备的创建,
节点注册以及派遣例程的设置等。
KKKKKKKKKKKKKKKKKKKKKKKK下面是官网资料 KKKKKKKKKKKKKKKKKKKKKKK
参考链接:>/""5
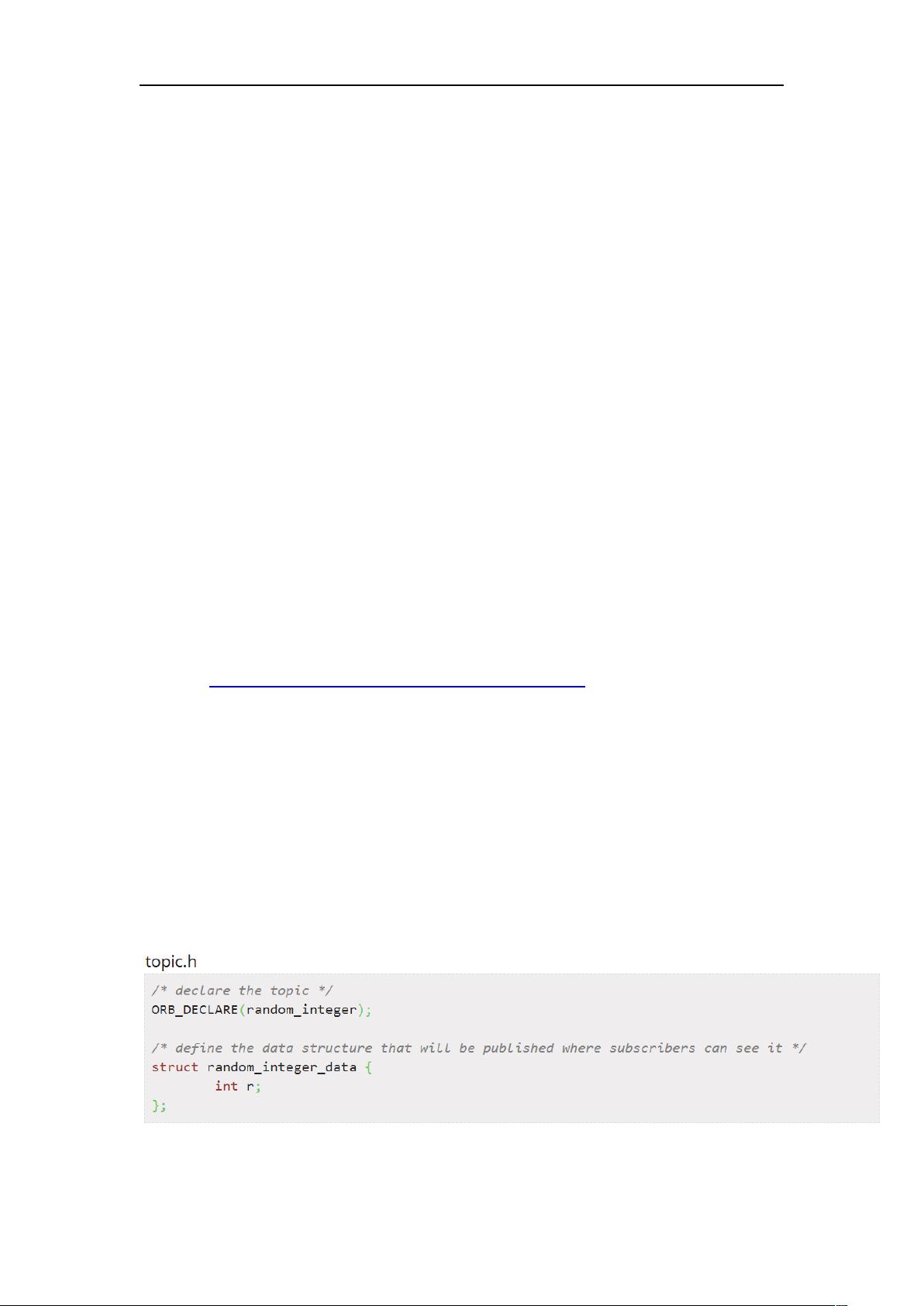
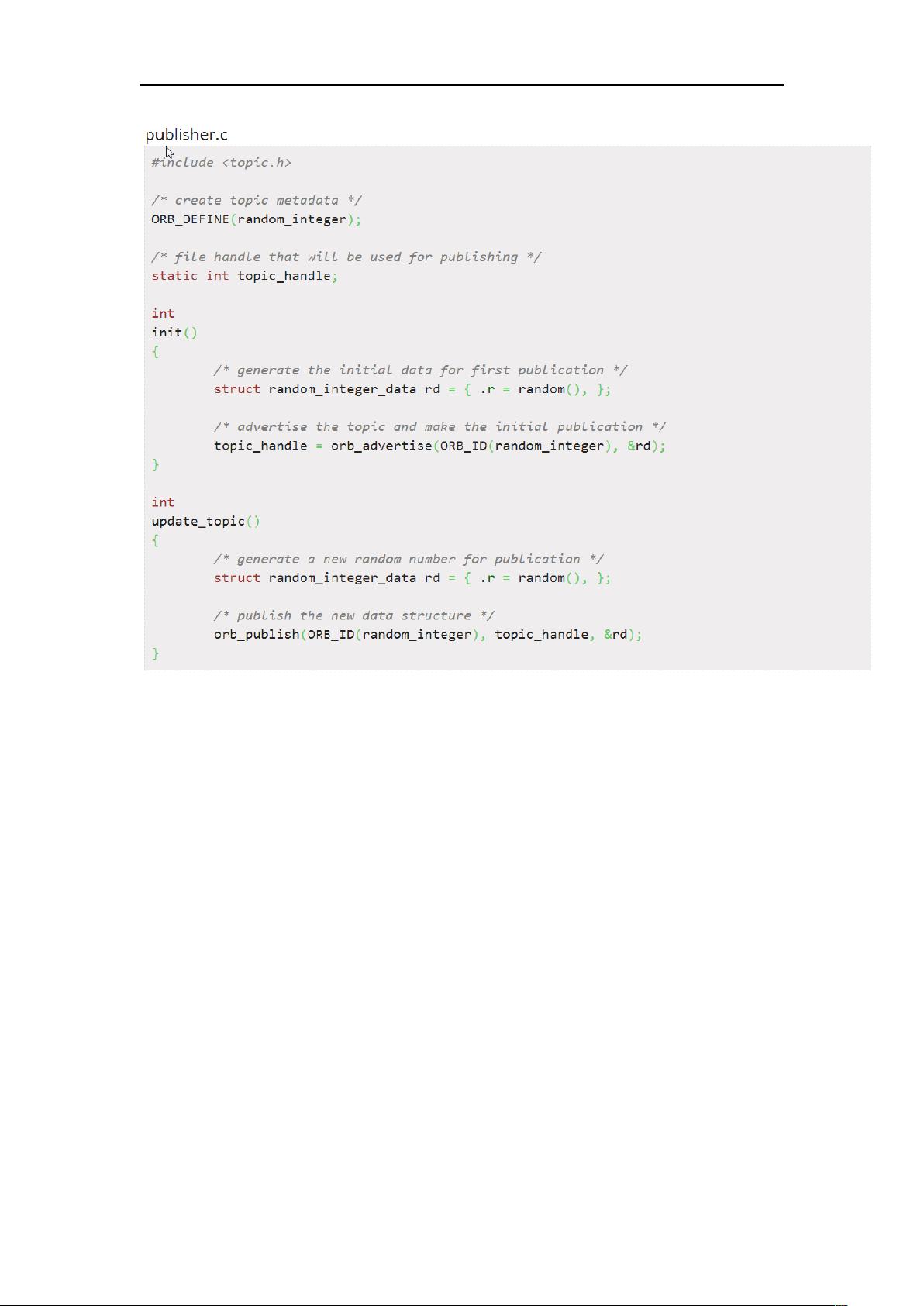
进程()程序()间通信(如将传感器信息从传感器
传送到姿态滤波 )是 程序结构的核心部分。进程(,在此处
被称作 )通过被命名的总线(>5,在此处被称作 )交换信息。在
中,一个 只包含一种信息类型,比如,D5这个 将一
个包含姿态结构体(、、;)的信息传送出去。, 可以在 >5
上 5>(发布)一个信息(即发送数据),也可以向一个 >5
剩余63页未读,继续阅读
105 浏览量
317 浏览量
334 浏览量
260 浏览量
309 浏览量
1319 浏览量
334 浏览量
点击了解资源详情
270 浏览量

生如~夏花
- 粉丝: 4733
- 资源: 51
 我的内容管理
展开
我的内容管理
展开







最新资源
- SQLite v3.28.0 for Linux
- CIFAR10-img-classification-tensorflow-master.zip
- fzf模糊搜索工具源码
- 行业文档-设计装置-一种具有存储功能的鼠标.zip
- stm32_timer_test0.zip
- pupland:这是一个使用React构建的响应式Web应用程序,允许用户浏览小狗的图片并喜欢它们。 它还允许用户搜索
- 智能电表远程抄表缴费管理平台JAVA源码
- LM-GLM-GLMM-intro:基于GLMGLMM的R中数据分析的统一框架
- angular-tp-api:使用NestJs构建的简单API。 最初旨在为Applaudo Angular学员提供后端服务以供使用
- 石青网站推广软件 v1.9.8
- specberus:W3C使用Checker来验证技术报告是否符合发布规则
- cortex-m-rt-Cortex-M微控制器的最小运行时间/启动时间-Rust开发
- jQuery css3开关按钮点击动画切换开关按钮特效
- flagsmith_flutter
- 机器人足部机构:切比雪夫连杆
- 影响matlab速度的代码-SolarGest_Modelling:SolarGest模拟器
