解析几何计算机视觉中的相机模型与基础概念
需积分: 9 188 浏览量
更新于2024-07-22
收藏 2.12MB PDF 举报
本文档深入探讨了"几何计算机视觉中的相机模型和基本概念",由Peter Sturm、Srikumar Ramalingam、Jean-Philippe Tardif、Simone Gasparini 和 Joao Barreto 合著,发表于《计算机图形与视觉研究进展》(Foundations and Trends in Computer Graphics and Vision)第6卷第1-2期(2010年),共183页。该文章旨在为理解计算机视觉中的图像处理技术提供全面的理论基础,特别关注相机模型及其在三维重建、立体视觉和多视图分析中的关键作用。
首先,作者从介绍和背景材料入手,概述了计算机视觉领域的基本原理和技术背景,强调了相机模型的重要性,因为它们是将二维图像转换为三维空间表示的关键工具。这些模型包括全球模型(如透视投影和非透视投影)、局部模型(适用于场景中的特定区域)、离散模型(适合处理像素级别的数据)以及用于描述相机射线分布的模型。
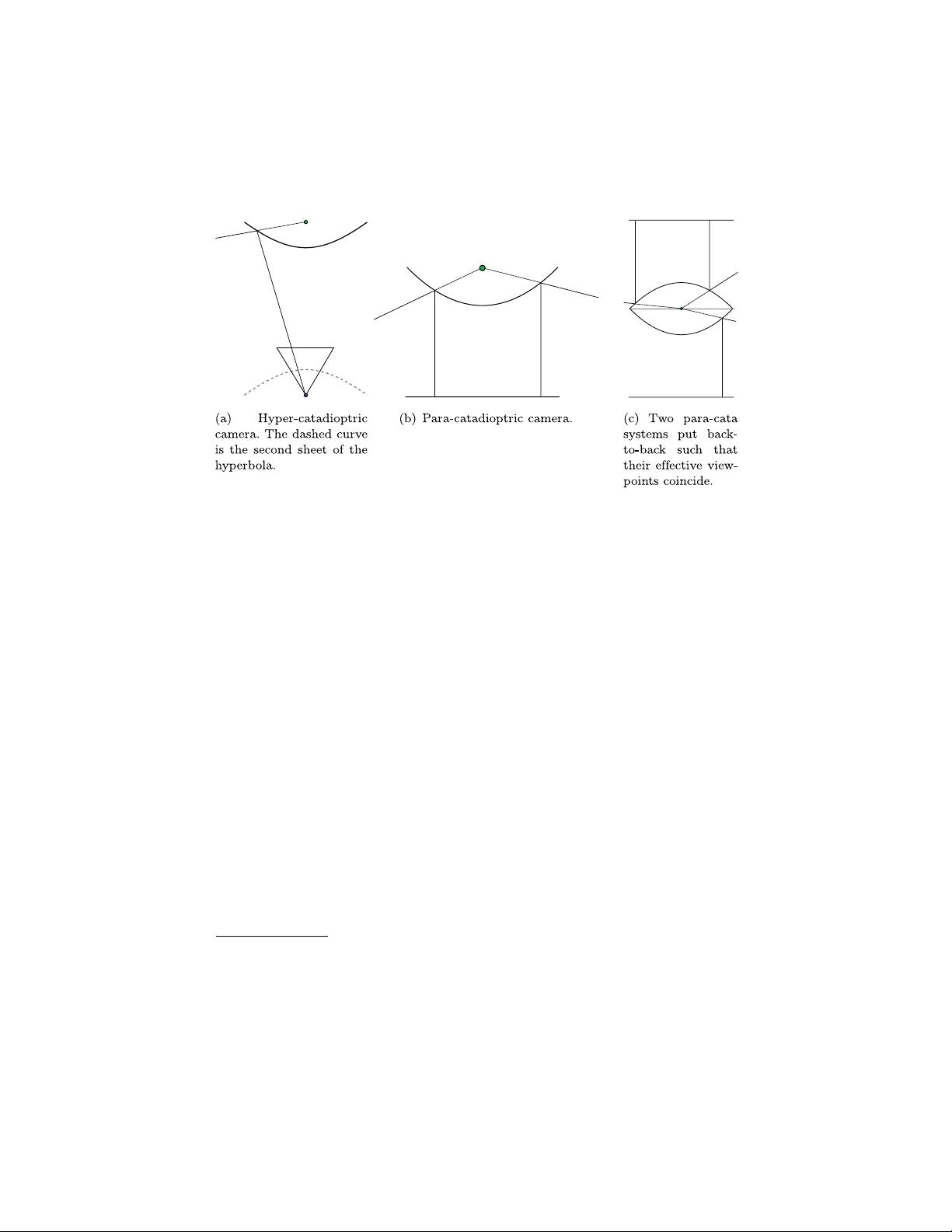
章节2详细讨论了几种技术,涵盖了移动相机或光学元件、鱼眼镜头、卡塔多普特系统(反射或折射成像的光学系统)、立体和多相机系统,以及其他新兴技术。这些技术的选择和应用对实际计算机视觉应用的性能和精度有着显著影响。
接下来的章节3专研相机模型本身,将焦点放在不同类型的模型上,如投影矩阵、径向畸变模型等,以及它们如何处理不同的成像条件。作者还比较了各种模型的优缺点,并指出在实际项目中如何根据需求选择合适的模型。
章节4深入到epipolar geometry和多视图几何,讨论了已知内参数(calibrated case)和未知内参数(uncalibrated case)下的图像关系,以及如何通过处理直线图像和测量来关联平面校准(plumb-line calibration)与非透视相机的自我校准问题。
最后,章节5集中探讨了相机校准的各种方法,包括使用校准网格进行的精确测量,这在确保相机参数准确性和图像之间的正确对应性方面至关重要。校准过程对于消除镜头畸变、实现三维重建以及在现实世界的定位和导航中发挥着核心作用。
这篇文章是一篇深入而全面的指南,对于从事计算机视觉研究和开发的专业人士来说,无论是理论学习还是实践应用,都是不可或缺的参考资料。它不仅提供了丰富的理论知识,还展示了如何将这些理论应用于解决实际问题。

14 Technologies
2.1.2 Classical Mosaics
By “classical” mosaics, we refer to classical in terms of the com-
puter vision community, i.e., mosaics generated by stitching together
2D images, but noting that slit imaging to generate mosaics has been
done before, at least with analog cameras. A tutorial on image align-
ment and stitching has been published in the same journal as this
survey, by Szeliski [487]. Due to this good reference and the fact, that
classical mosaic generation is widely known, we do not describe this
any further and simply give a few additional references.
An early and often overlooked work on digital mosaics is by Yelick
and Lippman, who showed how to combine images obtained by a
rotating camera to generate a mosaic [322, 547]. In his bachelor the-
sis [547], Yelick also discussed other omnidirectional image acquisition
techniques, such as the fisheye lens and rotating slit cameras. Later
works on digital mosaics include those by Teodosio and Mills [496],
Teodosio and Bender [495] and Chen [92], to name but a few among
the many existing ones.
2.1.3 Other Technologies
Murray analyzed the setup by Ishiguro et al. and others (see Sec-
tion 2.1.1) and proposed an alternative solution where instead of rotat-
ing the camera about some axis, the camera looks at a planar mirror
which rotates about an axis [362]. Such a system was already proposed
for aerial imaging by Bouwers and van der Sande [58]. However, the
issue of how to compensate for the camera displacement during rota-
tions of the mirror, due to the airplane’s motion, was not fully discussed.
Other systems that use rotating mirrors or prisms are referenced by
Yagi [541], see also Section 2.3.4.
2.2 Fisheyes
The concept of fisheye view and lens dates back to more than a cen-
tury [48, 226, 350, 536]. Fisheye lenses or converters can achieve larger
than hemispheric fields of view but are usually still relatively costly.
A technical report suggesting inexpensive simple solutions to build



剩余184页未读,继续阅读
2019-02-23 上传
2019-01-25 上传
2018-05-08 上传
2023-10-26 上传
2024-01-17 上传
2023-10-09 上传
2023-05-20 上传
2023-02-15 上传
2024-08-02 上传

sindianliu
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
