
第31卷第5期
2001年9月
东南大学学报
(自然科学版 )
JOURNAL OF SOUTHEAST UNIVERSITY (Natural Science Edition )
Vol.31 No.5
Sept . 2001
一种新颖的冗余度机器人及其视觉伺服方案
罗 翔 颜景平
(东南大学机械工程系 ,南京 210096 )
摘要 :视觉伺服冗余度机器人在灵巧操作、装配等领域有很好的应用前景 .为了减少其运动规
划的计算量 ,设计了一种具有准万向关节的七自由度机械臂结构 .在此基础上提出了一种基于
位姿分散自律速度控制的运动规划方法 :采用速度矢量极小最小二乘分解方法进行腕部运动
速度控制 ;根据欧拉角法则正向递推解决操作手的姿态规划问题 .文中还采用数值仿真手段验
证了其有效性 .该方法的特点是物理意义明确 ,算法简单 .同时具有一定的运动学鲁棒性 .
关键词 :冗余度机器人 ;运动规划 ; 视觉伺服
中图分类号 : TP242 文献标识码 : A 文章编号 :
1001 - 0505 (2001 )05-0028-05
收稿日期 :2001-03-26 . 作者简介 : 罗 翔 ,男 ,1968 年生 , 博士研 究生 .
基金项目 : 中 国 国 家 计 委 211 工 程资 助 项 目 (2102002001 ).
随着工业和军事等应用部门对机器人智能化要求的不断提高 ,对冗余度机器人的研究正日益引起研
究人员的关注 .但是 ,由于冗余度机器人的运动规划和优化非常复杂 ,计算量相当大 .如何使得冗余度机器
人的研究实用化 ,一直是一个难题
[1 ]
.本文尝试把机器视觉的反馈引导机制应用到冗余度机器人运动规划
中去 .
视觉伺服的定义
[2 ]
,指采用闭环的方式 ,通过不断地视觉反馈 ,来控制机器人的运动 .这和早期视觉机
器人采用开环的先“看”后“动”的方式有着极大的区别 ,这就对运动规划和图象处理的速度提出了更高的
要求
[2 ,3 ]
.
本文针对视觉伺服的冗余度机器人的特点 ,对冗余度机器人的机构设计和运动伺服规划算法进行了
较为系统的研究 .提出了一种基于位姿分散自律的视觉伺服控制运动规划方法 ,这种适用于执行级的算法
最大优点是不用计算全工作空间的 Jacobi 矩阵 .因而大大减少了运算量 ,提高了计算速度 .同时还具有一
定的运动学鲁棒性 .
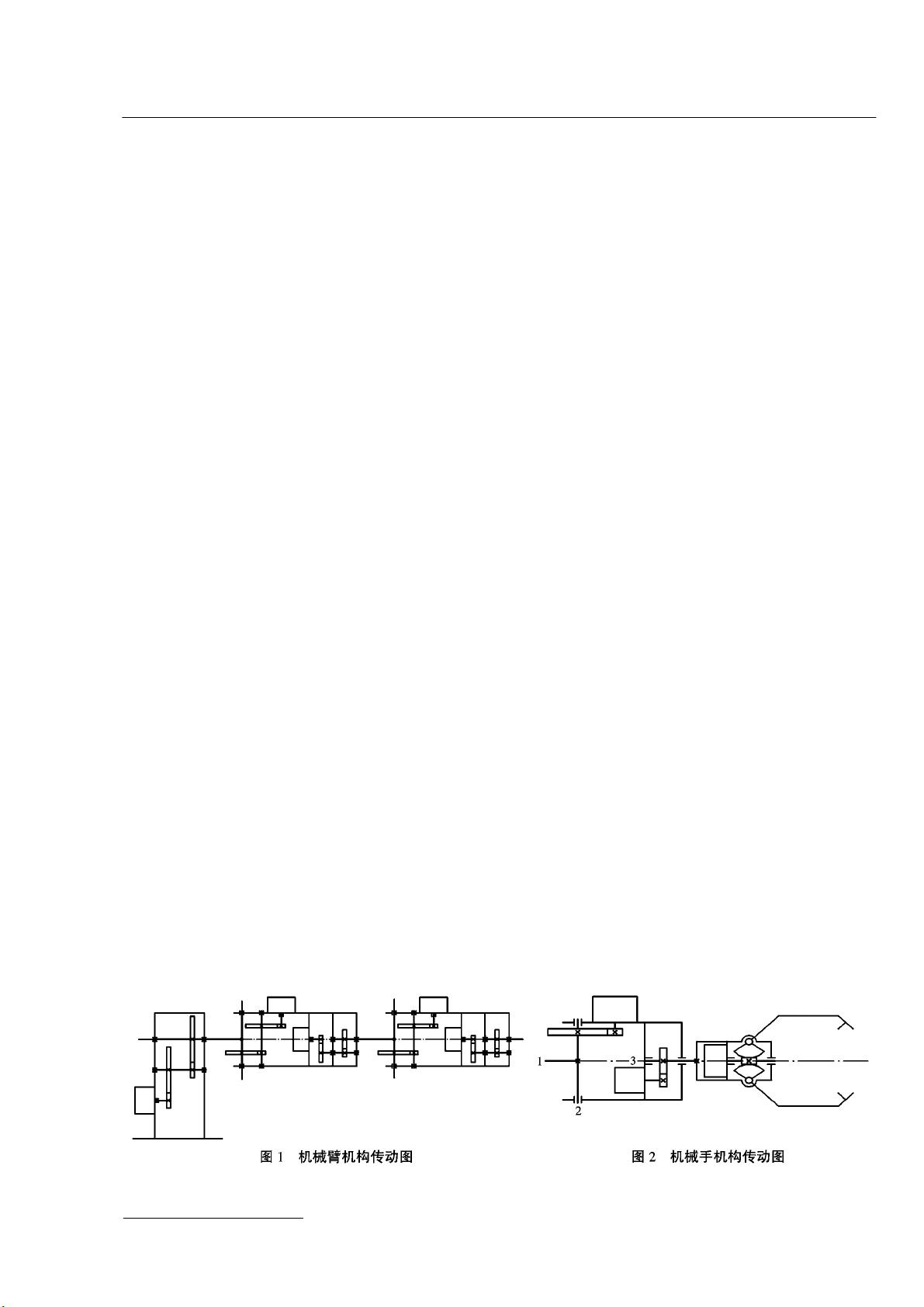
1 视觉伺服冗余度机器人系统描述
图 1 为本文提出的冗余度机器人机构传动图 .它包括 3 根杆 7 个旋转自由度 ,每个关节有 2 个相互正
交的旋转自由度 .这种结构虽不能完全实现万向转动 ,但可以做到杆轴线在空间的万向转动 ,因而可称之
为准万向关节 .手腕是 3 个相互垂直的关节轴组成 RPR 手腕(见图 2 ).这种结构理论上(即关节角可以旋
转 360°的情况下 )可以达到任意的姿态 .因而可以把一个复杂的操作臂运动规划问题分解为操作臂手腕的
空间位置规划问题和手部的姿态规划两部分
.
视觉系统采用光轴平行配置的双摄像机组成立体视觉系统 .系统为被动式 ,
即相对于机器人工作空间静
下载后可阅读完整内容,剩余4页未读,立即下载

weixin_38637884
- 粉丝: 6
- 资源: 869
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


