最小二乘行动者-评论家方法解决连续动作空间问题
105 浏览量
更新于2024-08-26
收藏 512KB PDF 举报
"本文介绍了一种名为最小二乘行动者-评论家(Least Square Actor-Critic, LSAC)的方法,该方法应用于解决强化学习中的连续动作空间问题。传统的强化学习算法常常通过离散化处理来解决连续动作空间,但在缺乏先验信息的情况下,这种方法可能效果不佳或完全失效。LSAC算法采用函数逼近器来近似表示值函数和策略,并利用最小二乘法在线动态地求解这些参数。这种算法被应用到小车平衡杆问题和mountain car问题上,并与CALC(连续行动者-评论家学习自动机)和eNAC(episodic Natural Actor-Critic)算法进行了对比,显示出在解决连续动作空间问题上的有效性和优越性能。"
本文详细探讨了强化学习领域的一个关键挑战,即如何处理具有连续动作空间的问题。传统的强化学习算法,如Q-learning和SARSA,通常需要将连续的动作空间离散化,以便于计算和优化策略。然而,离散化过程可能会导致信息损失,尤其是在没有合适先验信息的情况下,算法效率和准确性都会受到影响。
最小二乘行动者-评论家(LSAC)算法提供了一种新的解决方案。它不依赖于动作空间的离散化,而是采用函数逼近器,如神经网络,来近似表示策略函数(演员)和价值函数(评论家)。通过最小二乘法,算法能够在线地更新这两个函数的参数,使得策略参数的调整基于价值函数的反馈。这种设计使得LSAC能够在不断学习过程中优化策略,无需预先知道动作空间的具体结构。
在实际应用中,LSAC被应用于两个经典的强化学习问题:小车平衡杆问题和mountain car问题。这两个问题都涉及到控制一个物理系统,使其在连续的动作空间中达到目标状态。实验结果证明,LSAC能够有效地找到解决问题的策略,其性能优于CALC和eNAC算法。这表明LSAC算法在处理连续动作空间的强化学习任务时,具有较好的泛化能力和适应性。
LSAC算法为解决连续动作空间的强化学习问题提供了一个有前途的方法,它通过函数逼近和在线学习避免了离散化的需要,从而提高了算法在复杂环境中的表现。这一工作对于强化学习领域的理论研究和实际应用都有着重要的意义,为未来解决更多复杂的控制问题提供了新的思路。
计算机研究与发展2014,51(3)
数,并将TD误差引入到求解最优策略参数的目标
函数中,在行动者部分利用所构造的目标函数求解
最优策略参数,提高策略参数估计的精确性.利用最
小二乘方法求解参数可以有效消除初始值对最终收
敛结果的影响,提高样本数据的利用率,同时避免梯
度算法中调整学习参数的问题.最后,将本文提出的
算法用于解决具有连续动作空间的小车平衡杆问题
和mountain
car问题,并与Cacla和eNAC(叩isodic
natural
actor—critic)…朝这2种解决连续动作空间
的经典算法进行比较和分析.实验结果表明,本文的
算法能有效地解决连续动作空间问题,具有较优的
执行性能.
1
基础理论
1.1
Markov决策过程
Markov决策过程(Markov
decision
process,
MDP)常被用来对强化学习问题进行建模¨j.通常
一个MDP可以用一个五元组表示,M一(X,U,厂,
p,y),其中,X是状态空间,U是动作空间,厂是状态
转移函数,厂:X×U×X一[o,1],即/’(T,“,T
7)表示
在状态z∈X下采用动作“∈U转移到后续状态
z
7∈X的概率;』D是奖赏函数,10:X×U—i,即』0(T,
“)表示在状态z下采用动作“所获得的立即奖赏,
而通常为了简化,用“表示在任意时刻是当前状态
动作对的立即奖赏值,即“一|0(z。,“。);y∈(o,1)是
折扣因子.
强化学习算法可以用于求解一个不会随着时间
的变化而改变的策略,即稳定策略,并可以利用该策
略进行决策.在强化学习中,策略矗可以表示为^:
X×U一[o,1].^(z,“)是指在状态z下采取动作“
的概率.如果策略^是一个确定性策略,则在任意状
态z下,根据策略^只能获得一个确定的动作,而
不是动作选择的概率,由此,确定的稳定策略可以表
示为:^:X—U,因此,在状态T下采取的动作可以
表示为:“一^(z).在后续文中如果没有特别说明,
策略^都是指确定性策略.
为了评估用于某个MDP的策略^的优劣,通
常利用值函数进行评估,具体可以分为状态值函数
V“和动作值函数Q6,其中V‘(z)是在当前状态T
下根据策略^所能获得的累计期望奖赏,Q,7(z,“)
是在当前状态动作对(z,“)下根据策略^所能获得
的累计期望奖赏.V6(z)和d2(工,“)都可以认为是
对应的一组Bellman公式的不动点解,可以表示为
驴(z)一∑^(z,“)l
lD(工,“)+
“∈U
L-
),∑厂(zmz
7)驴(z圳,
(1)
r’∈X
—
Q^(工,“)一lD(z,“)+),∑厂(z,“,z7)
J’∈X
y矗(z7,“7)甜(z
7,“7).
(2)
篇7
强化学习的最终目的是能够求得一个最优策略
^’,对应的值函数V’(z)和Q+(z,“)可以描述为
V+(z)一H曼簪{』D(z,扰)+y∑/(z,蹦,z7)y’(z7)),
“t“
T’∈X
(3)
Q+(z,“)一10(z,“)+y∑,(z,“,z
7)
J’∈X
{maxQ+(z
7,“7)},
(4)
“4∈U
式(3)和式(4)也被称作是最优Bellman公式.
以下给出有界MDP的定义.在本文所讨论的
MDP都是有界的.
定义1.有界MDP.假设X和U都是一个有限
集合;奖赏值函数|0有界,即对于任意(z,“)∈X×
U,R…≤p(z,“)≤R…,其中R…和R。。。是常数;设
口一1/(1一y),其中y∈(o,1)为折扣因子,则在任意
策略^下,对于Vz∈X及V(T,“)∈x×U,都有
雕…≤V6(z)≤胆。。。和艘。。。≤甜(z,“)≤胆。。。
成立.
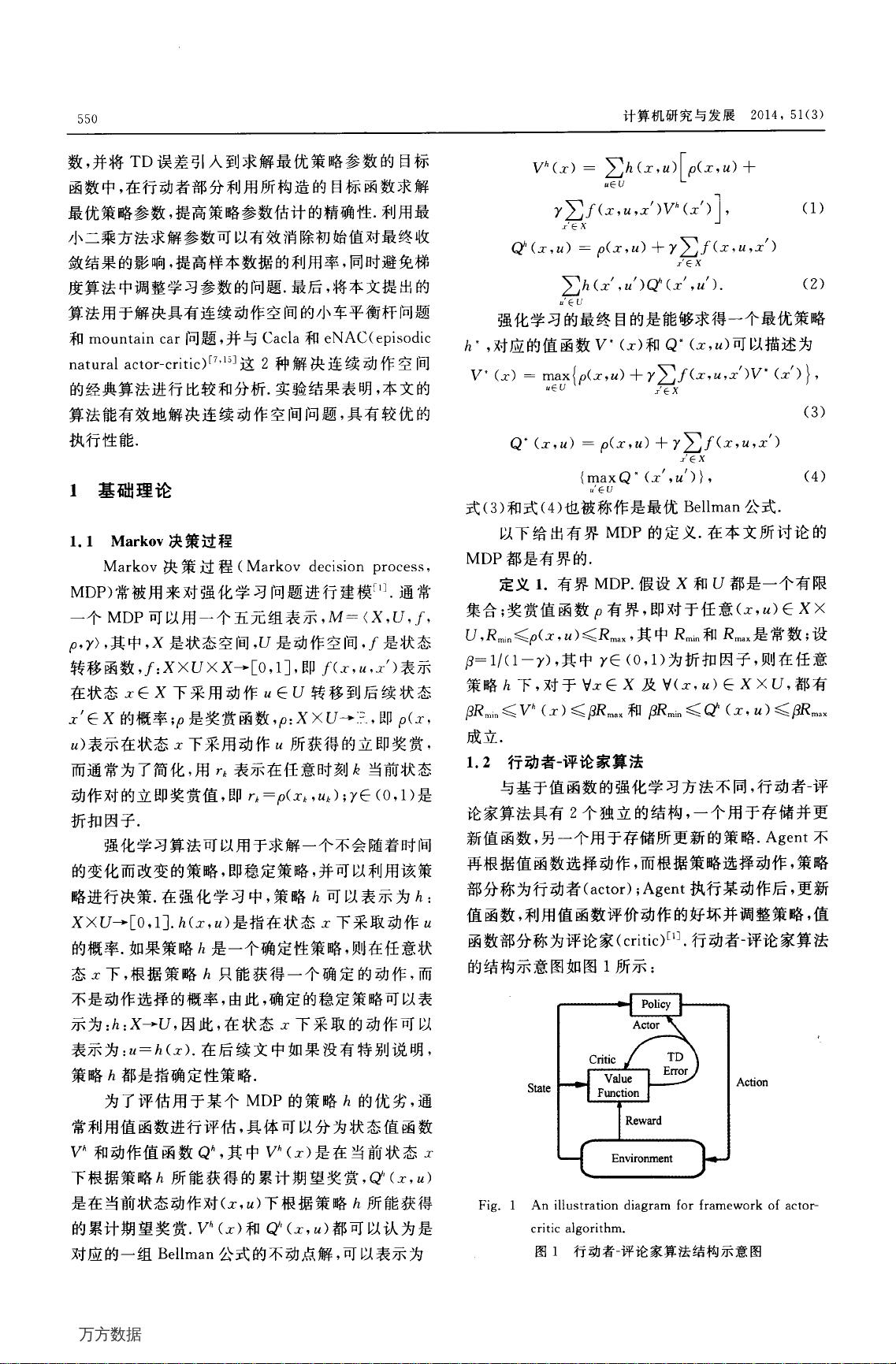
1.2行动者一评论家算法
与基于值函数的强化学习方法不同,行动者一评
论家算法具有2个独立的结构,一个用于存储并更
新值函数,另一个用于存储所更新的策略.Agent不
再根据值函数选择动作,而根据策略选择动作,策略
部分称为行动者(actor);Agent执行某动作后,更新
值函数,利用值函数评价动作的好坏并调整策略,值
函数部分称为评论家(critic)[1].行动者一评论家算法
的结构示意图如图1所示:
Fig.
1
An
illustration
diagram
for
framework
of
actor—
critic
algorithm.
图1
行动者一评论家算法结构示意图
万方数据
剩余11页未读,继续阅读
2019-07-22 上传
2013-11-26 上传
2024-07-27 上传
2023-08-06 上传
2023-09-19 上传
2023-06-12 上传
2023-05-10 上传
2023-05-12 上传
2023-09-11 上传

皮卡丘穿皮裤
- 粉丝: 187
- 资源: 955
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
