多延时多变量网络控制系统建模与稳定性分析
89 浏览量
更新于2024-08-31
收藏 165KB PDF 举报
"该文研究了一类具有多个延时的多变量网络控制系统(NCS)的建模和稳定性问题。文章作者假设传感器采用时间驱动模式,而控制器和执行器采用事件驱动模式,以此为基础建立了系统在连续时域的MIMO(多输入多输出)数学模型。接着,利用Lyapunov稳定性原理和Razumikhin定理,设计了系统的Lyapunov函数,对系统的渐近稳定性进行了分析,并得出了系统稳定所需的时延参数和稳定性条件。最终,通过仿真实例验证了提出的稳定性判据的有效性。"
本文主要探讨的是网络控制系统中的一个重要领域——多延时多变量网络控制系统的理论基础。网络控制系统是指通过网络进行通信和控制的系统,其中延时和多变量特性是两个关键因素,对系统的性能和稳定性有着显著影响。在这种系统中,传感器按照预定的时间间隔发送数据,而控制器和执行器则根据接收到的数据变化触发动作,这种时间驱动与事件驱动相结合的方式可以有效降低网络负载,但同时也引入了复杂性。
文章首先构建了一个MIMO模型,这是描述系统中多个输入与多个输出之间相互作用的数学工具。这种模型对于理解和分析多变量系统的行为至关重要。接着,作者借助Lyapunov稳定性理论,这是一种广泛用于证明动态系统稳定性的方法,通过构造Lyapunov函数来评估系统的稳定性状态。Lyapunov函数可以提供关于系统是否稳定以及稳定性的程度的信息。
Razumikhin定理在此处的作用是帮助处理系统中的延迟问题。这个定理提供了一种证明带有延迟的系统稳定性的方法,尤其适用于存在不确定性或时间延迟的情况。通过应用这个定理,作者能够推导出系统稳定所需的延时参数范围。
最后,通过仿真实验,作者验证了所提出的稳定性判据的正确性和实用性。这些实验结果有助于确认理论分析的准确性和在实际应用中的可行性,从而增强了研究的可信度。
这篇文章深入研究了多延时多变量网络控制系统的建模和稳定性分析,为这类系统的优化设计提供了理论支持,同时也为实际工程应用提供了参考依据。
第 26 卷 第 8 期
Vol. 26 No. 8
控 制 与 决 策
Control and Decision
2011 年 8 月
Aug. 2011
一类多延时多变量网络控制系统的建模及稳定性
文章编号: 1001-0920 (2011) 08-1239-04
张 俊
1,2
, 罗大庸
1
(1. 中南大学 信息科学与工程学院,长沙 410075;2. 湖南现代物流职业学院 物流工程系,长沙 410100)
摘 要: 针对一类多延时多变量网络控制系统 (NCS), 讨论其建模和稳定性问题. 首先假设传感器采用时间驱
动、控制器和执行器采用事件驱动, 建立了系统在连续时域里的 MIMO 数学模型; 然后根据 Lyapunov 稳定性原理和
Razumikhin 定理, 构造系统的 Lyapunov 函数, 并分析系统的渐近稳定性, 进而得到了系统稳定的时延参数和稳定性
条件; 最后通过仿真实例验证了该类网络控制系统的稳定判据.
关键词: 网络控制系统;建模;稳定性;时延
中图分类号: TP13 文献标识码: A
Modeling and stability of a class of multiple time-delay and multi-variable
NCS
ZHANG Jun
1,2
, LUO Da-yong
1
(1. School of Information Science and Engineering,Central South University,Changsha 410075 ,China;2. Department
of Logistics Engineering,Hu’nan Modern Logistics Occupation Technical College,Changsha 410100,China.
Correspondent:ZHANG Jun,E-mail:linecon23@163.com)
Abstract: This paper discusses about the modeling and stability of a class of multiple time-delay and multi-variable net
control system(NCS). Firstly, by supposing that sensor nodes are time driven, and controller and actuators are event driven,
an MIMO model in time domain is provided for the system. Then a Lyapunov function is built based on Lyapunov stability
theory and Razumikhin theory, and its stability and the conditions of delay parameter and stability are obtained. Finally,
simulation example shows the criterion about the NCS.
Key words: net control system;modeling;stability;time delay
1 引引引 言言言
网络控制系统 (NCS) 是一种网络化、分布化的
控制系统, 它以网络作为信息传输的载体, 通过网络
反馈构成闭环反馈控制系统. 由于网络控制系统中的
传感器、执行器与控制器之间通过网络交换信息, 这
必然会引起网络诱导延时. 时延的产生不但降低了
系统的实时性, 甚至引起系统的不稳定, 使得整个系
统的分析和设计变得困难. 近年来, 网络控制系统的
建模、时滞和稳定性问题已成为控制领域中关注的热
点, 而且对 NCS 的研究取得了一些成果.
文献 [1] 中针对连续系统模型和连续控制器模
型, 提出了最大允许传输间隔的概念, 给出了系统的
稳定性条件; [2-3] 研究了时变时延网络控制系统的稳
定性和渐近稳定性; [4-6] 利用 LMIs 方法处理稳定性
问题, 得到了依赖于时滞的具有较小保守性的结论.
本文研究一类多延时多变量网络控制系统. 首先
建立其 MIMO 系统的数学模型; 然后进行了稳定性分
析, 得到其稳定条件; 最后通过仿真结果表明了文中
稳定性条件推导的有效性.
2 多多多延延延时时时多多多变变变量量量网网网络络络控控控制制制系系系统统统模模模型型型描描描述述述
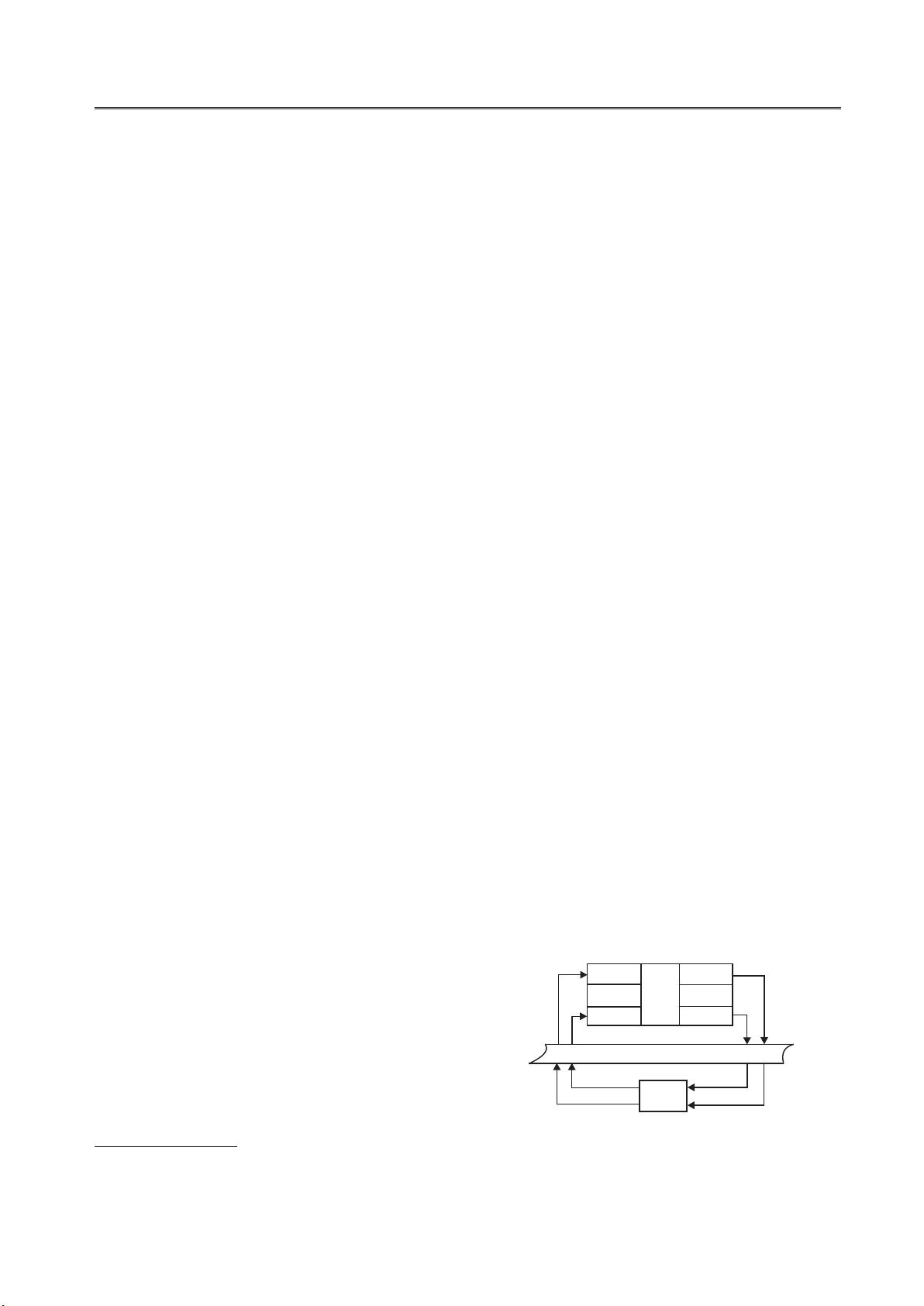
由多个传感器、执行器和控制器组成的 NCS 系
统如图 1 所示
[7]
, 它由被控对象 𝐺
𝑝
(包括 𝑟 个传感器,
!"# 1
!"# m
$%# 1
$%# r
&'
()
G
p
'*#
G
c
..
.
...
...
...
...
...
+,
τ
ca
1
τ
ca
m
...
τ
sc
1
τ
sc
r
...
图 1 MIMO 网络控制系统
收稿日期: 2010-04-24;修回日期: 2010-11-30.
作者简介: 张俊(1978−), 女, 讲师, 博士生, 从事智能自动化、网络控制系统的研究;罗大庸(1944−), 男, 教授, 博士生
导师, 从事综合自动化系统、智能控制等研究.
下载后可阅读完整内容,剩余3页未读,立即下载
2021-09-25 上传
2021-03-03 上传
点击了解资源详情
125 浏览量
点击了解资源详情
102 浏览量
点击了解资源详情
163 浏览量
点击了解资源详情

weixin_38694566
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
