BST纠偏调试:步骤详解与相机设置
需积分: 49 41 浏览量
更新于2024-07-17
收藏 6.28MB DOCX 举报
本文档详细介绍了BST纠偏系统的调试步骤,主要针对一款特定的相机系统进行操作指导。首先,我们需要了解左上角的红色方框区域,其中:
1. R表示总线系统运行正常,O则表示系统故障。
2. 空白符号表示照相机状态,S无同步帧信息,ICCD预置,SCCD暂停,PCCD预操作,OCCD工作。
3. 2.1处的CAN地址标识相机连接的网络地址。
4. 蓝色框内的箭头指示触发阈值,通过调整边的扫描方向(由明到暗)来检测边缘。
相机菜单部分详细列出了以下几个关键步骤:
A. 将相机对准机械中心,确保其位置准确。
B. 数码相机扫描面应与物料运行面保持垂直,以便精确检测。
C. 连接相机至24伏电源。
D. 将曲线模式设置为VWN模式,这是具有白平衡功能的视频曲线标准表示,只有在接上物料后才会显示数值。
E. 进行黑平衡调整,目的是确定相机的最大可照范围。具体操作包括启动菜单、选择blackbalance选项、保存参数并确认。注意,在黑平衡过程中,不要退出菜单,直到完成保存。
F. 如果物料宽度超出预设范围,可能需要调整曝光时间和曝光模式(A=自动曝光,F=手动曝光),以确保所有物料都能被正确检测到,避免偏移。
G. 调整曝光设置以适应物料特性,确保相机在最佳条件下工作,避免因光照不足或过强导致的检测问题。
整个调试过程涉及到硬件连接、相机参数配置、以及针对具体物料特性的优化,对于确保BST纠偏系统的准确性和稳定性至关重要。通过这些步骤,用户能够有效地诊断和解决可能出现的问题,提升生产效率。
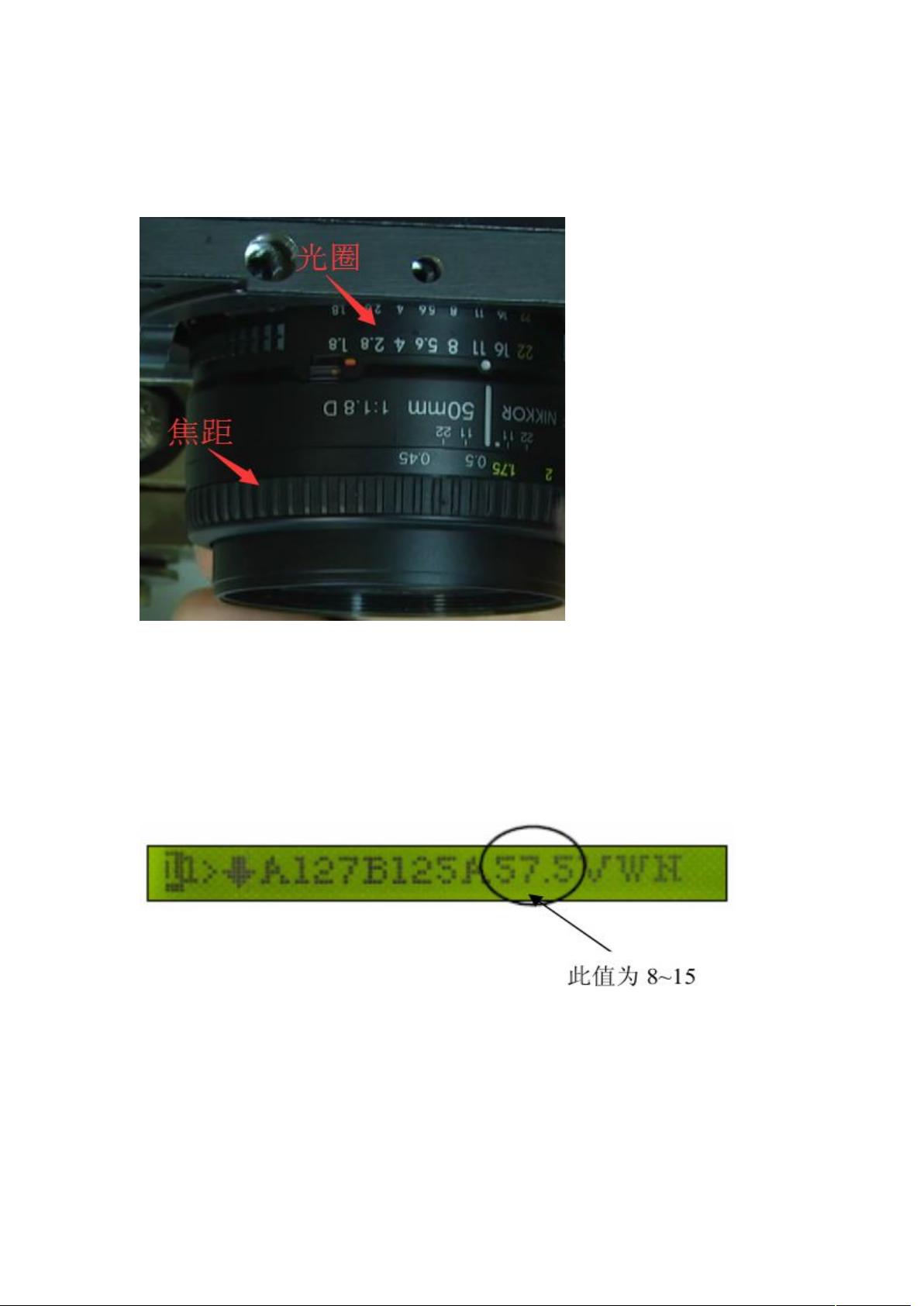
- 点击 ENTER 键,选择 A
- 打开照相机的护圈。
第一,调整光圈使曝光时间在 8~15(单位:毫秒)之间。
(一般调到 11 就行)。
第二,调整合适的焦距(可直接用尺量出相机到物料的距
离)。
剩余21页未读,继续阅读
2023-06-06 上传
2023-04-23 上传
2023-06-01 上传
2023-05-22 上传
2023-06-03 上传
2023-06-01 上传
2023-06-01 上传

iambellwether888
- 粉丝: 16
- 资源: 88
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
