"基于51的智能小车设计:避障/循迹/重力感应遥控(c语言)毕业论文"
85 浏览量
更新于2024-01-23
收藏 3.06MB DOC 举报
基于51的避障循迹重力感应遥控的智能小车设计是一个非常有意义的毕业设计课题。随着汽车工业的快速发展,智能小车的研究也越来越受到关注。全国各大赛事都经常提到智能小车这个话题,各高校也非常重视这方面的研究。本设计是在这样的背景下提出的,并且有着丰富的指导教师经验。本课题是根据科研项目确定的设计类课题,目标是设计一辆智能电动小车,能够具备适应能力,能够自动避障并且能够智能规划路径。
在现代社会中,智能化是一个新的发展方向,智能小车作为智能化的产物,可以在一个特定的环境中按照预先设定的模式自动运行,无需人为干预,可以完成预期的目标甚至更高的目标。与遥控小车不同,智能小车通过计算机编程来实现对行驶方向、启停和速度的控制,操作员可以通过修改智能小车的计算机程序来改变它的行驶方向。智能小车具有再编程的特性,可以被看作是一种机器人。
这个毕业设计的研究意义非常巨大。自从1978年中国确定将"智能模拟"作为国家科学技术发展规划的主要研究课题以来,智能化的研究逐渐得到了重视。本设计项目的实施可以推进智能化的发展,探索智能小车领域的新应用和新技术。
在设计过程中,主要使用了51单片机作为核心控制器,根据重力感应原理设计遥控系统,采用循迹技术实现小车的自动导航,并且引入了避障技术,使小车能够智能地避开障碍物。这些技术的运用使得智能小车具备了自主避障和循迹的能力,能够在不同环境中按照设定的路径安全行驶。
本设计主要包括了绪论、遥控系统设计、循迹系统设计、避障系统设计、系统调试与测试等几个部分。在绪论中介绍了选题背景和研究意义,解释了智能小车的概念和发展趋势。在遥控系统设计中,详细介绍了基于51单片机和重力感应原理的遥控系统的设计方法和实现过程。在循迹系统设计中,介绍了循迹技术的原理和实现方法,以及在智能小车中的应用。在避障系统设计中,介绍了避障技术的原理和实现方法,以及在智能小车中的应用。在系统调试与测试阶段,对整个智能小车系统进行了调试和测试,验证了设计的可行性和有效性。
通过本设计项目的实施,不仅加深了对智能小车技术的理解和掌握,还培养了团队合作能力、解决问题的能力和创新能力。这些能力对于未来的就业和学术研究都具有重要意义。
总之,基于51的避障循迹重力感应遥控的智能小车设计是一个具有重要研究意义和实际应用价值的项目。通过本设计项目的实施,可以推进智能小车技术的发展,提高智能化水平,并为智能交通和人工智能领域的研究提供一定的参考和借鉴。
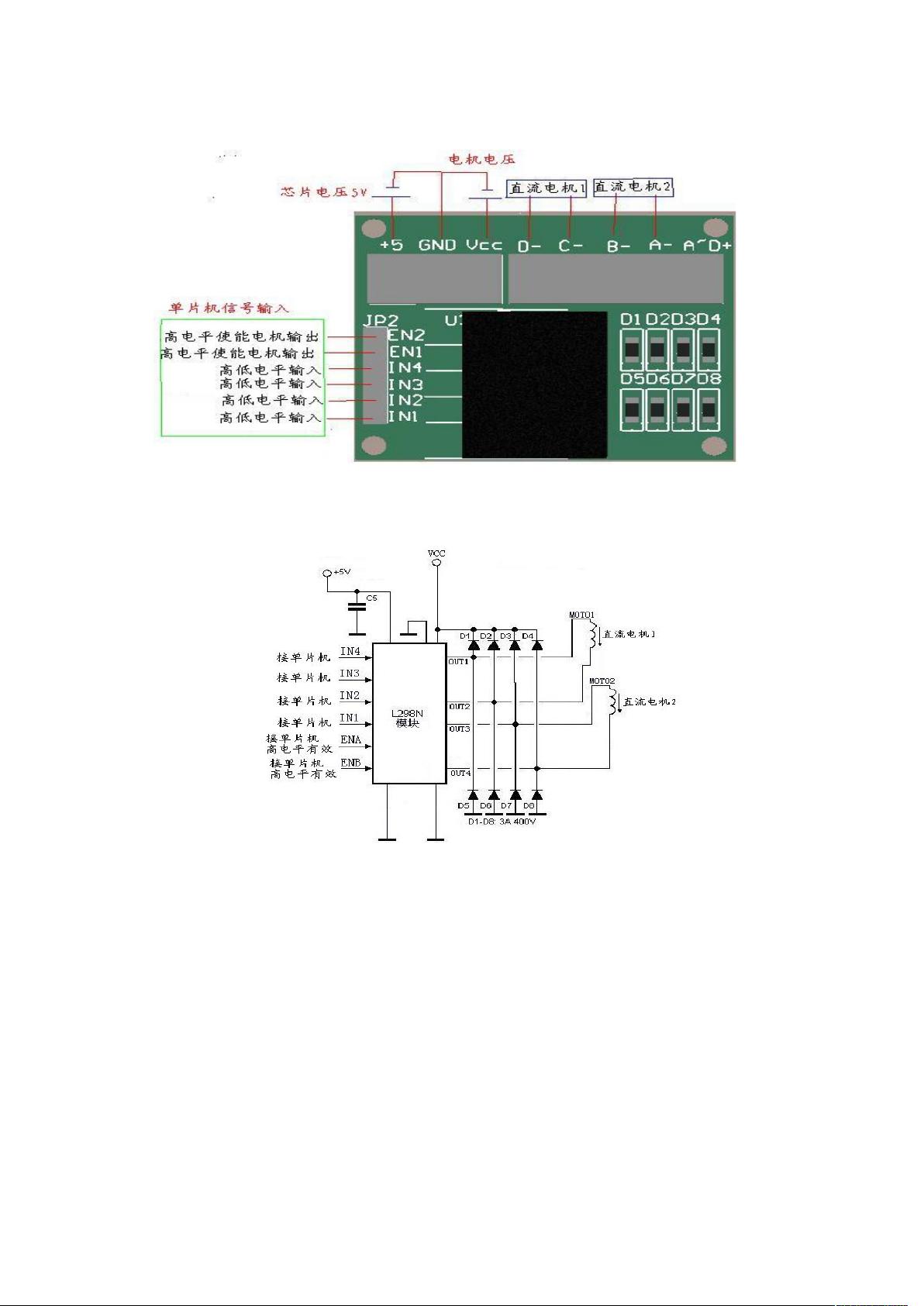
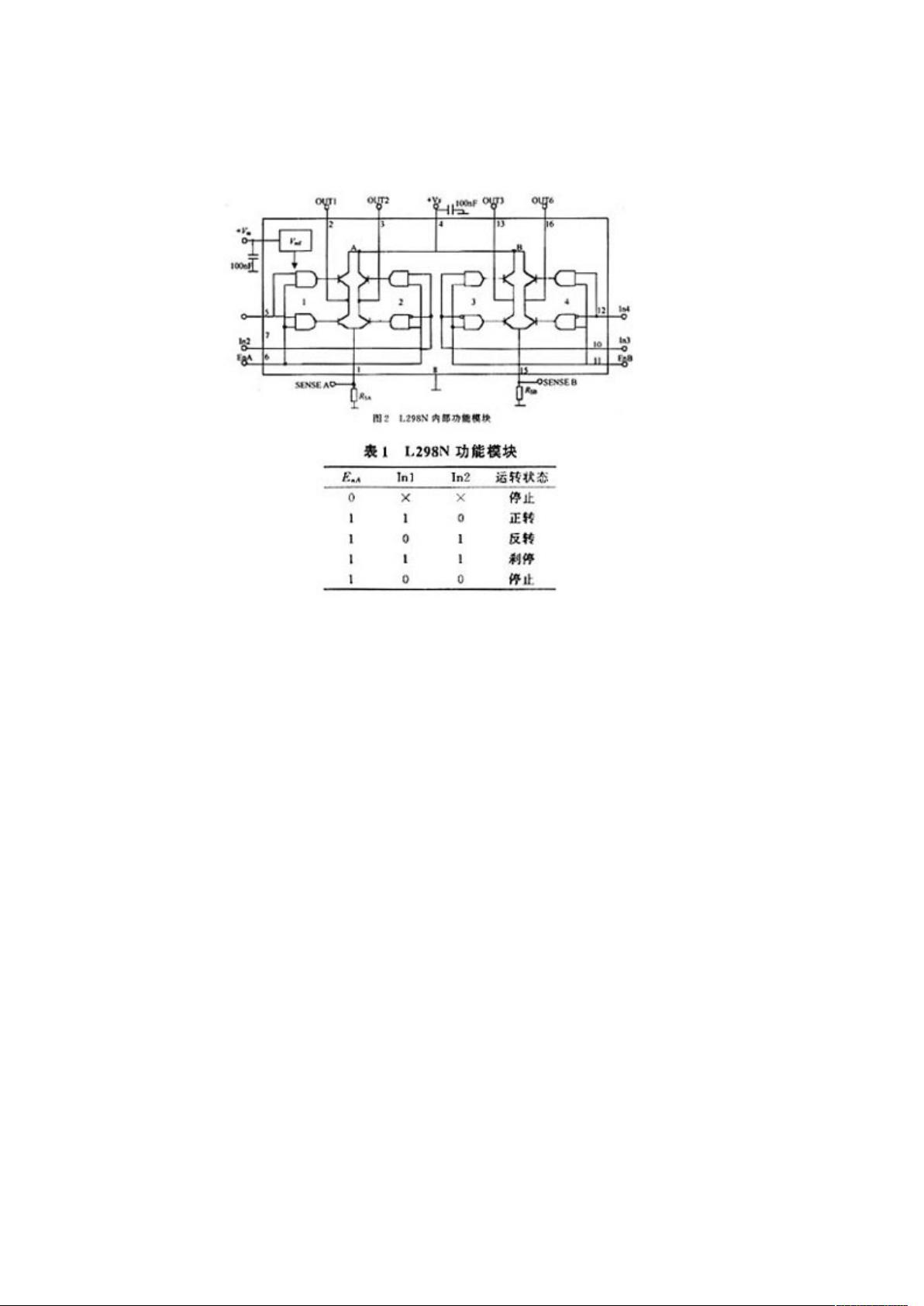
直流电机,实物图及外围电路如下图 6、7 所示。
图 6 L298N 芯片
图 7 L298N 外围电路
接口说明如下示:
+5V:芯片电压 5V。
VCC:电机电压,最大可接 50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了 VCC。
EN1、EN2:高电平有效,EN1、EN2 分别为 IN1 和 IN2、IN3 和 IN4 的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
剩余57页未读,继续阅读
215 浏览量
201 浏览量
2023-07-10 上传
2023-07-10 上传
2023-07-06 上传
点击了解资源详情

yyyyyyhhh222
- 粉丝: 467
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
