S7-200PLC PID控制详解:设置与应用
需积分: 12 178 浏览量
更新于2024-07-23
收藏 598KB PDF 举报
"这篇资料主要介绍了如何在S7-200 PLC中使用PID控制,内容包括PID控制的基本原理、S7-200 CPU对PID的支持情况、PID算法的实现方式以及关键参数的设置。"
S7-200 PLC的PID控制是一种常见的工业自动化控制方法,它通过比例-积分-微分算法来调整系统输出,以使被控对象的反馈值接近设定值。S7-200系列CPU可支持多达8个独立的PID控制回路,每个回路对应一个PID指令功能块。
PID控制的核心在于三个主要参数:比例系数(Kp)、积分时间(Ti)和微分时间(Td),以及采样时间(Ts)。比例系数决定了响应的快慢,积分时间用于消除稳态误差,微分时间则有助于提前预测并减少系统振荡。采样时间则是算法执行的间隔,影响控制的精度和实时性。
在S7-200 PLC中,PID功能块采用迭代算法进行计算,每次执行都会根据当前的给定值、反馈值和前一次的输出值进行更新。为了实现这一功能,需要在V数据存储区定义一个PID回路表,用于存储相关数据。调用PID功能块时,需要指定回路编号和表的起始地址。
在实际应用中,由于不同的物理量具有不同的单位和量程,PID功能块内部处理的是0.0到1.0之间的实数,代表调节范围的百分比。因此,实际的传感器输入和执行器输出都需要经过适当的转换和标准化,确保数据能被正确处理。
对于温度、压力等物理量的控制,需要将这些工程量转换成PID功能块可接受的百分比形式。这通常涉及到量程的缩放和偏移操作,确保输入和输出值在0.0至1.0之间。例如,如果温度传感器的测量范围是0°C到100°C,那么0°C对应0%,100°C对应100%。
总结起来,使用S7-200 PLC进行PID控制需要理解PID算法的基本原理,合理设置控制参数,并进行输入输出的转换。通过正确的配置和编程,可以实现精确而稳定的闭环控制系统,有效应对各种生产过程中的控制需求。
6
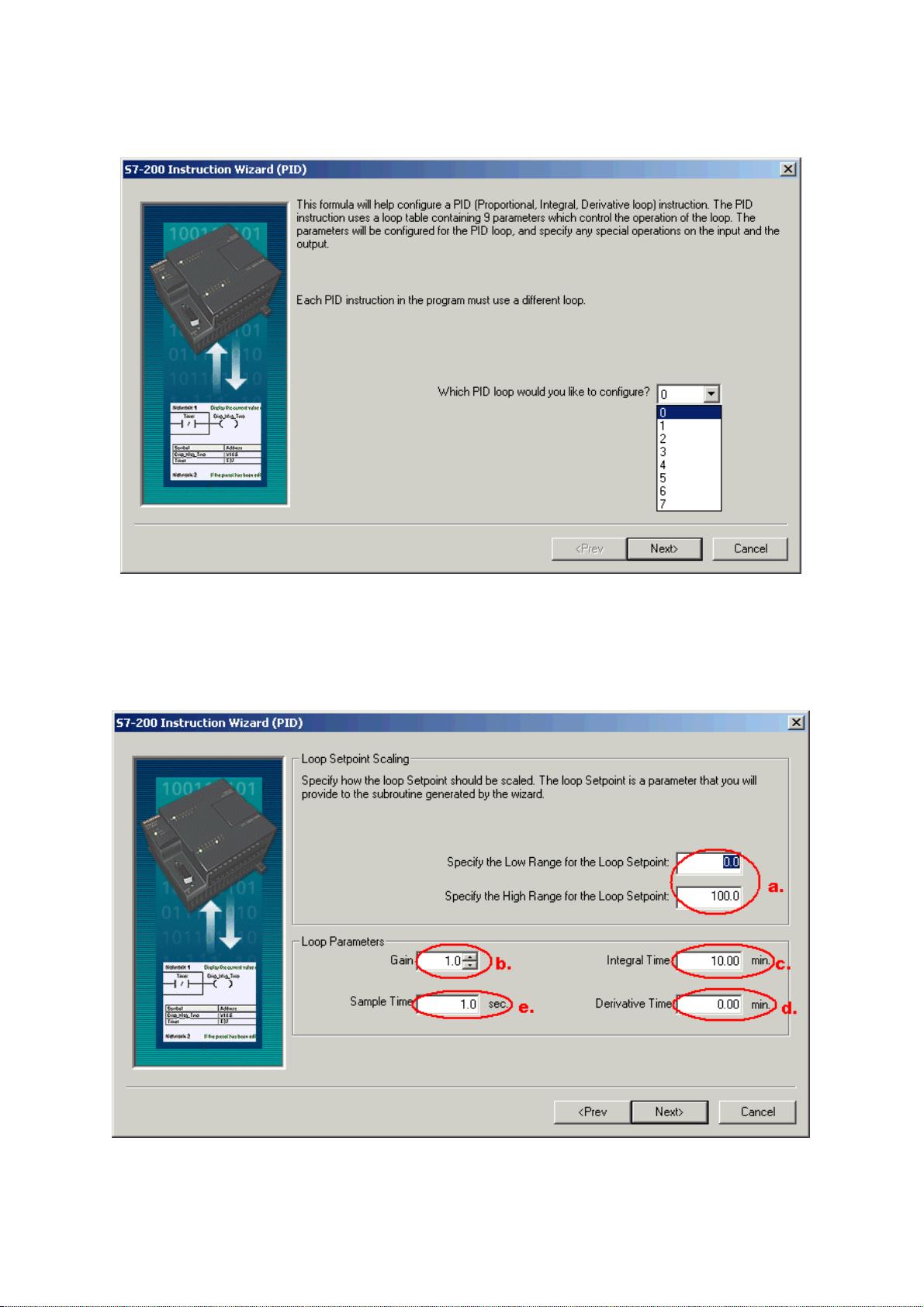
第一步:定义需要配置的 PID 回路号
图 3. 选择 PID 回路号
第二步:设定 PID 回路参数
图 4. 设置 PID 参数
剩余26页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
197 浏览量
点击了解资源详情
246 浏览量
136 浏览量
点击了解资源详情
149 浏览量

fengyunbianhuanyun
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







