51单片机实现位置式PID控制算法详解
需积分: 9 78 浏览量
更新于2024-09-10
收藏 76KB DOC 举报
"51单片机PID算法程序"
本文主要探讨了如何在51单片机上实现PID(比例-积分-微分)控制算法,以增强对PID算法的理解。51单片机作为数字控制系统的一部分,通过AD转换器采集模拟信号并转化为数字信号,然后在单片机内部进行PID运算,最后通过DA转换器将控制量反馈回系统,实现伺服控制。
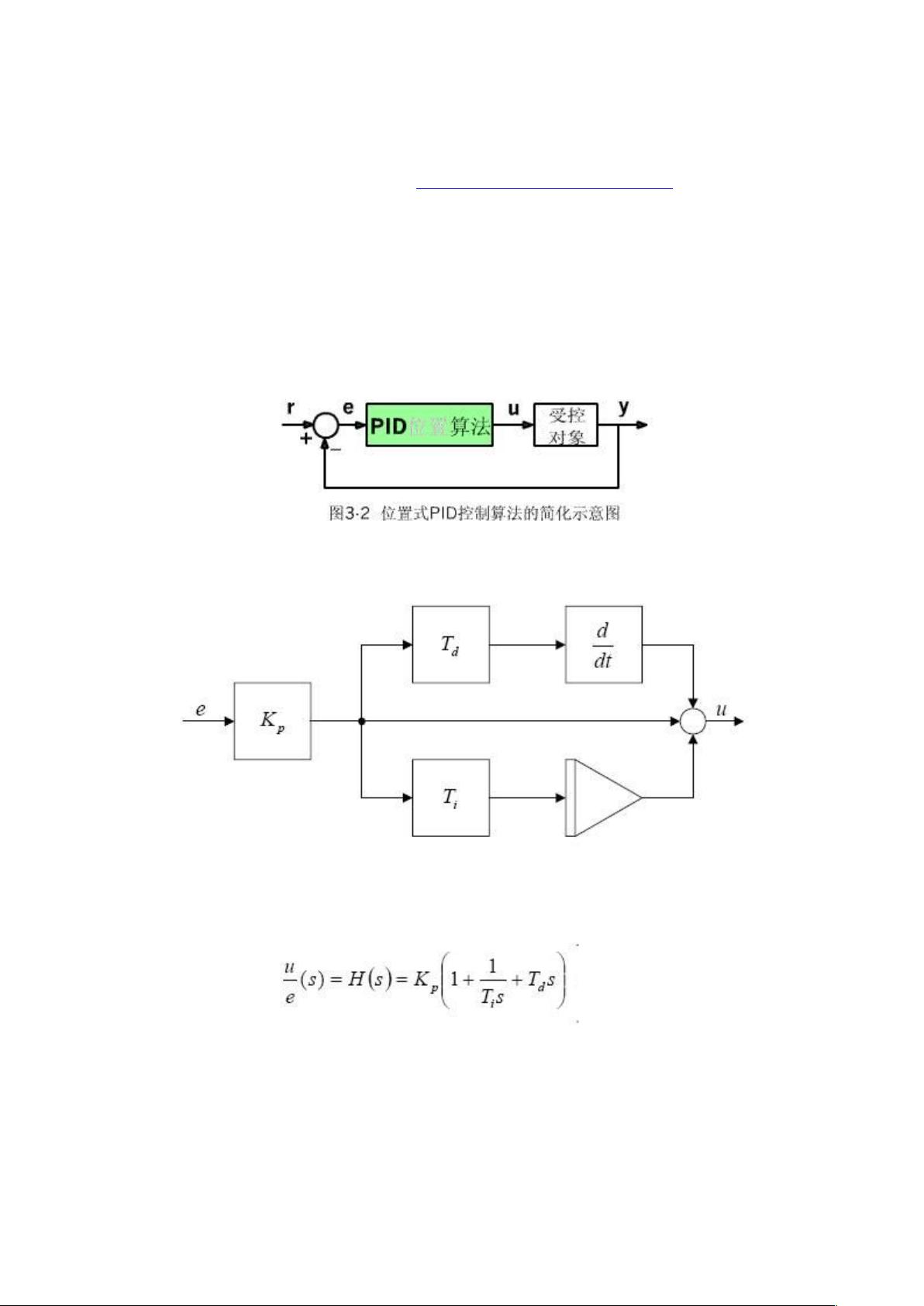
位置式PID控制算法是基于连续时间PID控制理论的一种离散化实现。其基本思想是,根据误差(e)的历史累计值和变化率来调整控制量u(n)。在离散形式下,位置式PID的传递函数可简化为:
\[ u(n) = K_P e(n) + K_I \sum_{k=0}^{n} e(k) + K_D \frac{e(n) - e(n-1)}{T} \]
其中,\( K_P \)是比例放大系数,\( K_I \)是积分放大系数,\( K_D \)是微分放大系数,\( T \)是采样周期。当采样周期足够小,离散控制过程可以近似连续过程。
这种算法的优点在于直接给出全部控制量,但同时也存在两个主要缺点:一是计算量大,需要积累过去的误差;二是对计算机故障敏感,可能导致执行机构的位置大幅度变化,可能引发严重事故。
在51单片机中实现PID算法时,通常会考虑硬件限制,如处理速度和RAM资源。为了提高运算效率,通常使用整数运算代替浮点数运算,并通过移位操作来实现类似定点数的计算。不过,这样的做法可能会引入精度问题,需要在高精度需求时注意余数补偿。
以下是一个简单的C51程序框架,展示了如何在51单片机上编写位置式PID算法,但未包含输入输出处理部分:
```c
#include<reg52.h>
#include<string.h>
// PID参数及变量定义
int Kp, Ki, Kd, T;
int errorSum, lastError, currentError;
void PID_Init(int _Kp, int _Ki, int _Kd, int _T) {
// 初始化PID参数
Kp = _Kp; Ki = _Ki; Kd = _Kd; T = _T;
errorSum = 0; lastError = 0;
}
void PID_Update(int error) {
currentError = error;
errorSum += error;
int derivative = (currentError - lastError) / T;
int controlOutput = Kp * currentError + Ki * errorSum + Kd * derivative;
// 控制输出处理部分(此处省略)
lastError = currentError;
}
// 主循环
void main() {
PID_Init(...); // 设置初始参数
while(1) {
int measuredError = ...; // 获取测量误差
PID_Update(measuredError);
// 执行其他系统任务
}
}
```
请注意,实际应用中还需要根据具体系统特性调整PID参数,并添加输入输出处理代码,以适应不同的控制需求。此外,还可以考虑引入自适应PID、模糊PID等高级算法,以提高控制性能。
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-05-31 上传
2014-09-24 上传
2012-06-30 上传
2022-11-15 上传
2022-06-15 上传

shixinguangjun
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
