
The landmark s can optionally be saved in a map format
that can be used to recognize areas that have been vis-
ited before. That is, a by-product of the robust naviga-
tion solution is a mapping and exploration system.
Our application example is based on a military patrol
boat, Figure 1, that often maneuvers close to the shore
in high speeds, at night, without visual aid in situations
where GPS jamming or spoofing cannot be excluded. As
the results will show , we are able to navigate in a co m-
plex archipelago using only the radar and get a map
that is very close to ground truth.
To provide a complete backup sys tem for GPS, global
reference measurements are necessary to eliminate the
longterm drift . The surface navigation system in [4,5],
assumed that an accurate sea chart is available. The idea
was to apply map matching between the radar image
andtheseachart,andtheparticlefilterwasusedfor
this mapping. Unfortunately, commercial sea charts still
contain rather large absolute errors of the shore, see
[1,2], which makes them less useful in blind navigation
with critical maneuvers without visual feedback.
The radar used in these experiments measures the dis-
tances to land areas using 1,024 s amples in each direc-
tion, and a ful l revol ution is comprised of roughly 2,000
directions. Each scan has a radius of about 5 km giving
a range resolution of roughly 5 m. These measurements
are used to create a radar image by translating the range
and bearing measurements into Cartesian coordinates.
An example of the resulting image is shown in Figure 2.
The radar image gives a birds eye view of the sur-
rounding islands and by tracking these islands, info rma-
tion about how the vessel is moving is obtained. We use
the Scale-Invariant Feature Transform (SIFT) [6] to
extract trackable features from the radar image which
are subsequently matched with features from later
scans. These features are shown to be distinct and stable
enough to be used for island tracking. Other feature
detectors like Speeded Up Robust Features (SURF) [7]
could equally well have been used. When these features
are tracked using a filter, estimates of the vessel move-
ments are obtained that over time give an accurate tra-
jectory estimate.
The outline is as follows; Section II gives a overview of
the related work followed by a theoretical filtering f ra-
mework in Section III. In Section IV, the performance
of SIFT is evaluated on radar images, and the trajectory
estimation performance on experimental data is given in
Section V. The paper then ends in Section VI with con-
clusions and suggested future work.
II. Background and relation to slam
The approach in this contribution is known as the
Simultaneous Localization And Mapping (SL AM) pro-
blem. Today, SLAM is a fairly well-studied problem
with solutions that are reaching some level of maturity
[8,9]. SLAM has been per formed in a wide variety of
environments such as indoors [10], in urban [11-14] and
rural areas [13,15], underwater [16,17] and in the air
[18] and the platform is usually equipped with a multi-
tude of sensors such as lasers, cameras, inertial measure-
ment u nits, whe el encode rs, etc. In this work, we wi ll
useonlytheradarsensorofanavalvesseltoperform
SLAM in a maritime env ironment. The data used were
recorded in the Stockholm archipelago by Saab B ofors
Dynamics [19].
Radars have been used for a long time to estimate
movements, for example in the e arly experiments by
Clark and Durrant-Whyte [20]. Radar reflect ing beacons
in known positions were tracked using a millimeter
Figure 1 Th e hig h-speed patrol bo at ty pe used for the data
acquisition. Note the backwash created by the jet propulsion
system. Courtesy of Dockstavarvet AB.
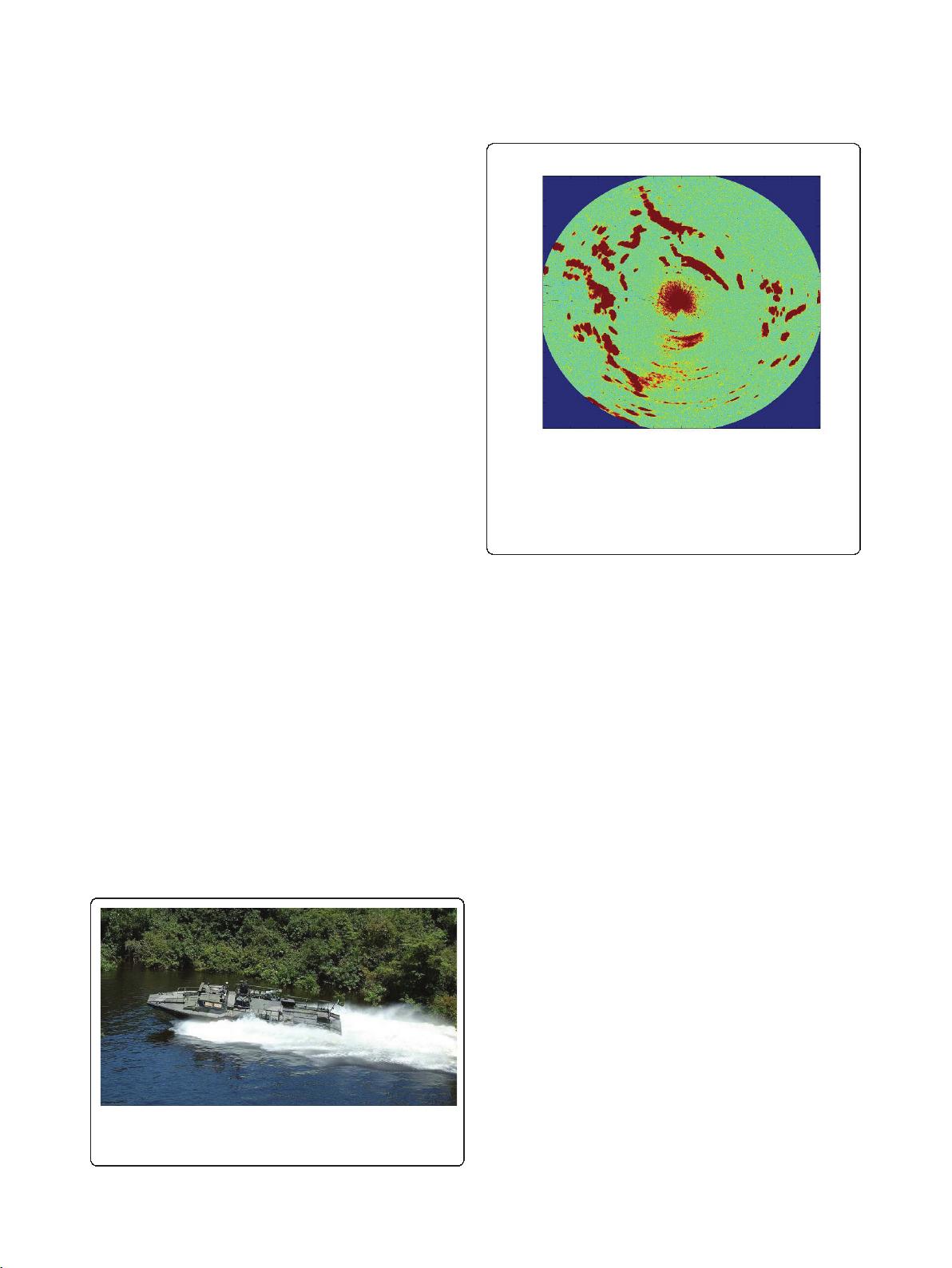
Figure 2 Typical radar image showing the islands surrounding
the vessel. The radar disturbances close to the vessel are caused
by the vessel and the waves. Behind the vessel (lower part of the
image), the striped-shaped disturbances are the result of
backwashes reflecting the radar pulses.
Callmer et al. EURASIP Journal on Advances in Signal Processing 2011, 2011:71
http://asp.eurasipjournals.com/content/2011/1/71
Page 2 of 11
剩余11页未读,继续阅读

Kamron_l
- 粉丝: 1
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


