"三种方法快速更改Fanuc机器人TCP教程.pdf"
版权申诉
200 浏览量
更新于2024-02-28
收藏 123KB PDF 举报
Fanuc机器人更改TCP教程.pdf中提到,当在同一TCP下示教时,示教的点比较多,且示教即将结束的时候,才发现当前使用的TCP中的值是不对的,不利于客户今后自己示教(或者说与老客户已经使用习惯的TCP值不同)。解决这个问题的办法有以下三种:第一种方法是将正确的TCP值输入到当前使用的TCP中,在需要更改部分的前面插入语句"TOOL_OFFSET CONDITION,PR[ ]",然后在所要更改的点后面插入"TOOL_OFFSET"。PR[ ]中输入的的坐标值为更改后与更改前TCP值的差值。第二种方法与第一种类似,就是在输入正确TCP值后,在需要修改的点后插入TOOL_OFFSET,PR[ ]语句,PR[ ]中输入的的坐标值为更改后与更改前TCP值的差值。第三种方法是在每一个点里将坐标显示方式更改成JOINT模式,当所有点更改完后,进入FRAMES页面更改TCP,运行程序,此时笛卡儿坐标系下的坐标值也是当前TCP值下的坐标值了。还有一种方法是选择并进入要更改的程序,将坐标显示方式更改成JOINT模式,当所有点更改完后,进入FRAMES页面更改TCP,运行程序,此时笛卡儿坐标系下的坐标值也是当前TCP值下的坐标值了。
根据Fanuc机器人更改TCP教程.pdf所述,在示教过程中可能会出现一个情况,即当示教的点比较多时且示教即将结束时,才发现当前使用的TCP中的值是不对的,这时需要更改已示教点的TCP值,但同时对于已经示教好的点又无需进行重新示教。针对这个问题,该教程提出了四种解决办法。第一种方法是在需要更改部分的前面插入语句"TOOL_OFFSET CONDITION,PR[ ]",然后在所要更改的点后面插入"TOOL_OFFSET",并在PR[ ]中输入要更改的TCP值和更改前的TCP值的差值。第二种方法是与第一种类似,只是在输入正确TCP值后,在需要修改的点后插入TOOL_OFFSET,PR[ ]语句,PR[ ]中输入的的坐标值同样为更改后与更改前TCP值的差值。第三种方法是将坐标显示方式更改成JOINT模式,在每一个点里将坐标显示方式更改成JOINT模式,当所有点更改完后,进入FRAMES页面更改TCP,运行程序,此时笛卡儿坐标系下的坐标值也是当前TCP值下的坐标值了。最后一种方法是在UTILITIES菜单中选择TOOL OFFSET,将要更改的程序复制到一个新的程序中,然后更改第一个TCP值。
总的来说,Fanuc机器人更改TCP教程.pdf提供了多种解决方案,帮助用户在遇到需要更改TCP值的情况下,能够选择恰当的方法,避免重新示教所有点,提高工作效率。
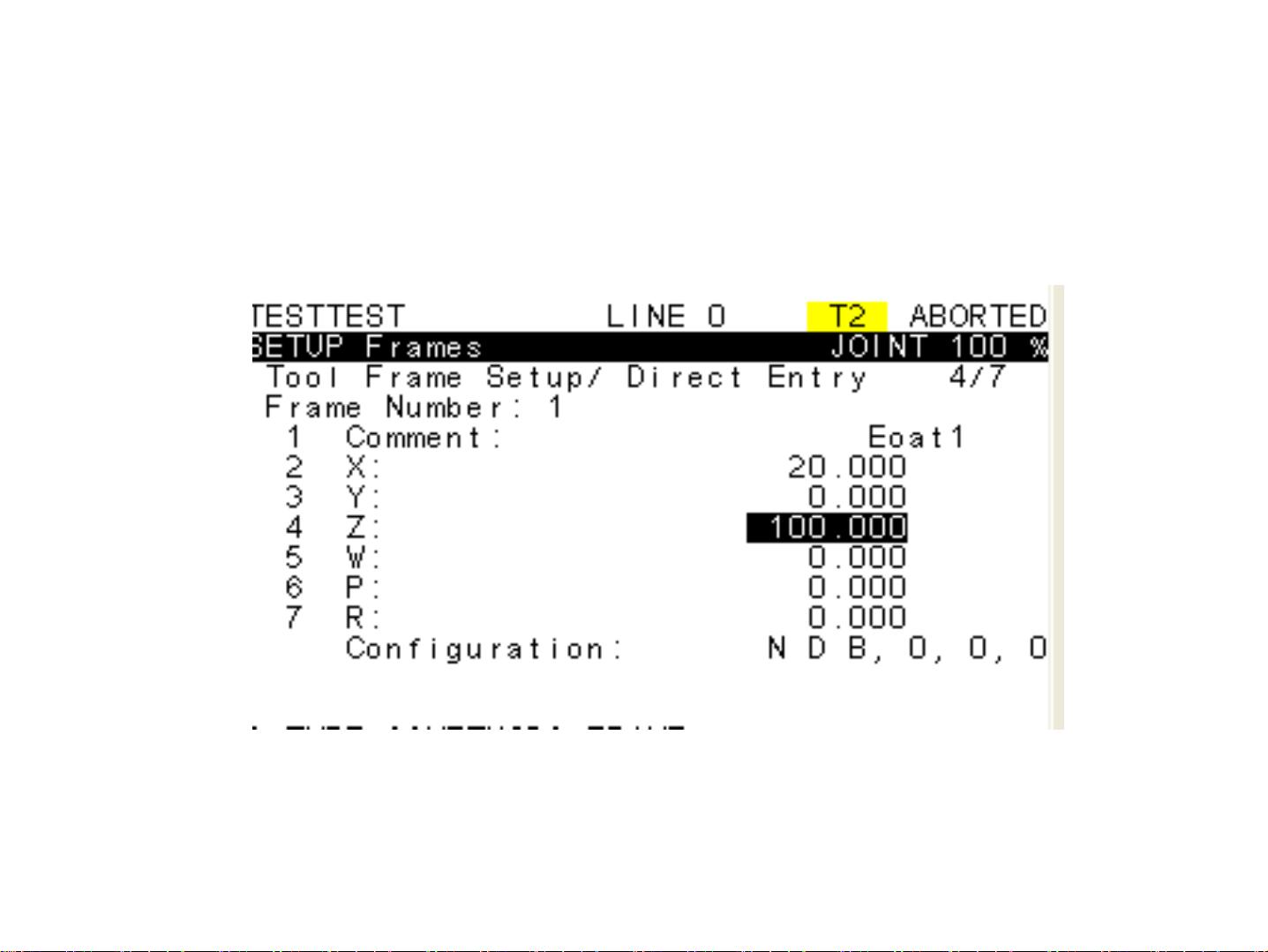
• 要将上面的TCP更改成X=20,Z=100;其余坐标不动,那
么先在MENU中选择SETUP,按 F1选择FRAMES项,在里
面将TCP 的值设置为正确值,如图
方法一
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-05-27 上传
2022-06-16 上传
2022-06-15 上传
2022-06-11 上传
2021-11-10 上传
2014-12-15 上传

是空空呀
- 粉丝: 194
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
