




KUKA机器人高级编程:CREAD与CWRITE详解
需积分: 5 131 浏览量
更新于2024-07-03
2
收藏 1.63MB PDF 举报
"该资源是一份关于库卡(KUKA)机器人系统软件8.2的CREAD/CWRITE编程指南,主要介绍了如何使用CWRITE函数进行通信操作。这份文档由KUKA机器人 GmbH发布,日期为2011年3月8日,版本号为KSS8.2 CREAD/CWRITE V1 en。"
正文:
在工业自动化领域,库卡机器人以其高性能和灵活性而著名。KUKA机器人的高级编程涉及多种指令和功能,其中CREAD(读取)和CWRITE(写入)是用于机器人与外部设备之间通信的重要工具。这些函数允许机器人系统与PLC、传感器、执行器等设备交换数据,实现更复杂的自动化流程。
CWRITE函数主要用于将数据从机器人控制器写入外部设备,例如发送控制信号或设置参数。在KUKA系统软件8.2中,CWRITE可能包含以下步骤:
1. **定义通信接口**:首先,你需要定义机器人与外部设备之间的通信接口,这可能是通过以太网、串行端口或其他协议如PROFINET或EtherCAT。
2. **配置数据格式**:根据所连接设备的要求,配置CWRITE的数据格式,可能包括字节、字、双字等数据类型,以及数据的字节顺序和端序。
3. **指定地址和数据**:确定要写入的设备地址,通常是一个特定的寄存器或内存位置,并提供要写入的数据值。
4. **调用CWRITE函数**:在程序中调用CWRITE函数,传递配置好的接口、地址和数据。这个过程可能需要在特定的程序段或循环中进行,以确保在正确的时间发送数据。
5. **错误处理**:在编程时应考虑错误处理,比如检查通信是否成功,是否有超时或数据冲突等问题。
文档可能还涵盖了与CWRITE相关的其他语句,这些语句可能用于辅助通信过程,例如设置通信参数、启动和停止通信任务,或者处理通信中断。
值得注意的是,虽然此文档针对的是KUKA系统软件8.2,但可能会有未描述的其他功能存在于控制器中。用户不能期望这些未公开的功能始终可用,特别是在更换或服务工作中。同时,尽管文档内容经过了与硬件和软件的一致性检查,但仍然可能存在差异,因此不能完全保证与实际操作完全一致。
此外,由于技术的不断发展,文档中的信息可能会有所更改,但KUKA会定期更新文档以包含必要的修正。在实际应用中,确保始终使用最新版本的文档和软件以获取最准确的信息。
12 / 67 Issued: 03.08.2011 Version: KSS 8.2 CREAD/CWRITE V1 en
CREAD/CWRITE
Overview
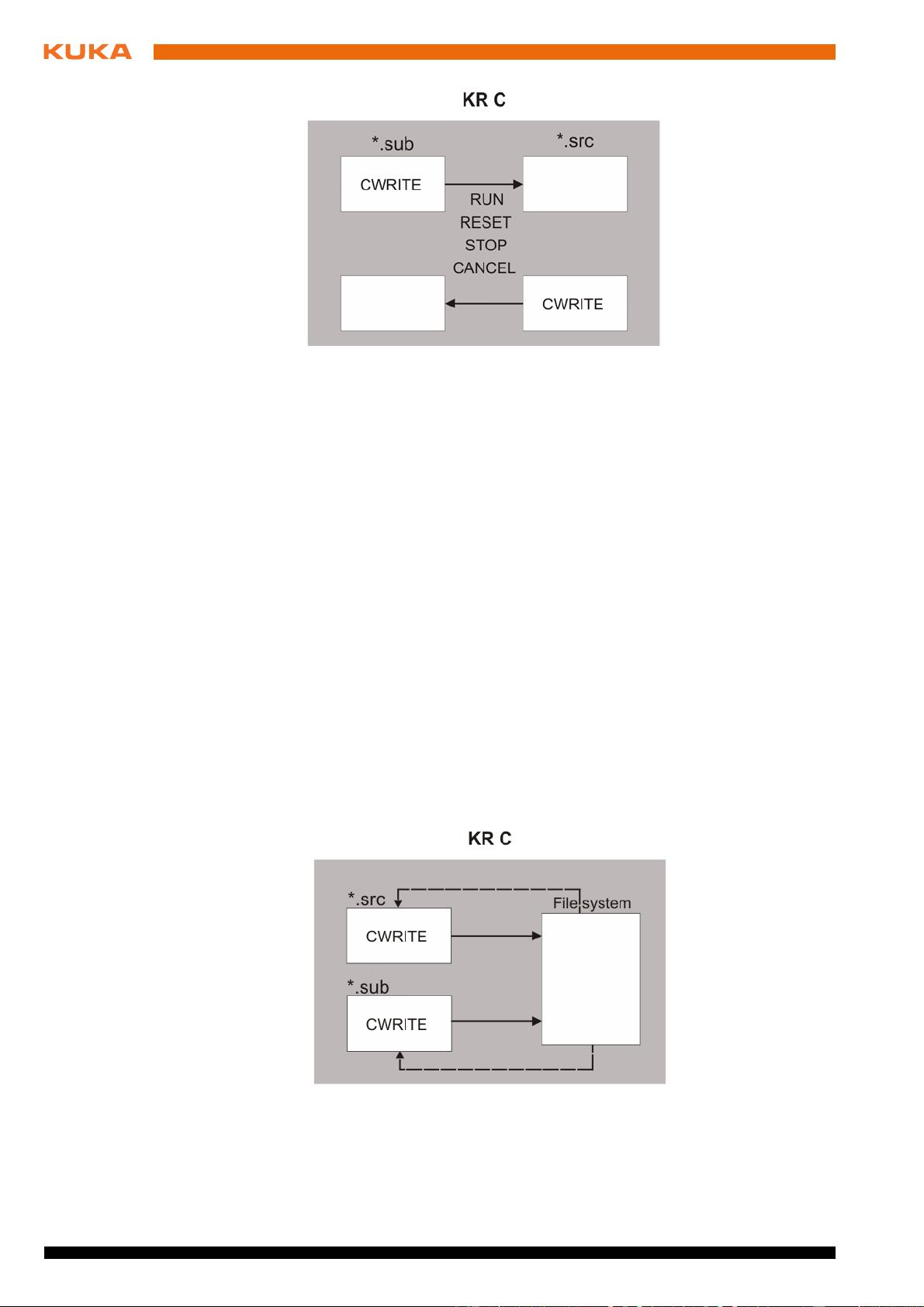
4.3 Communication via the command channel $FCT_CALL
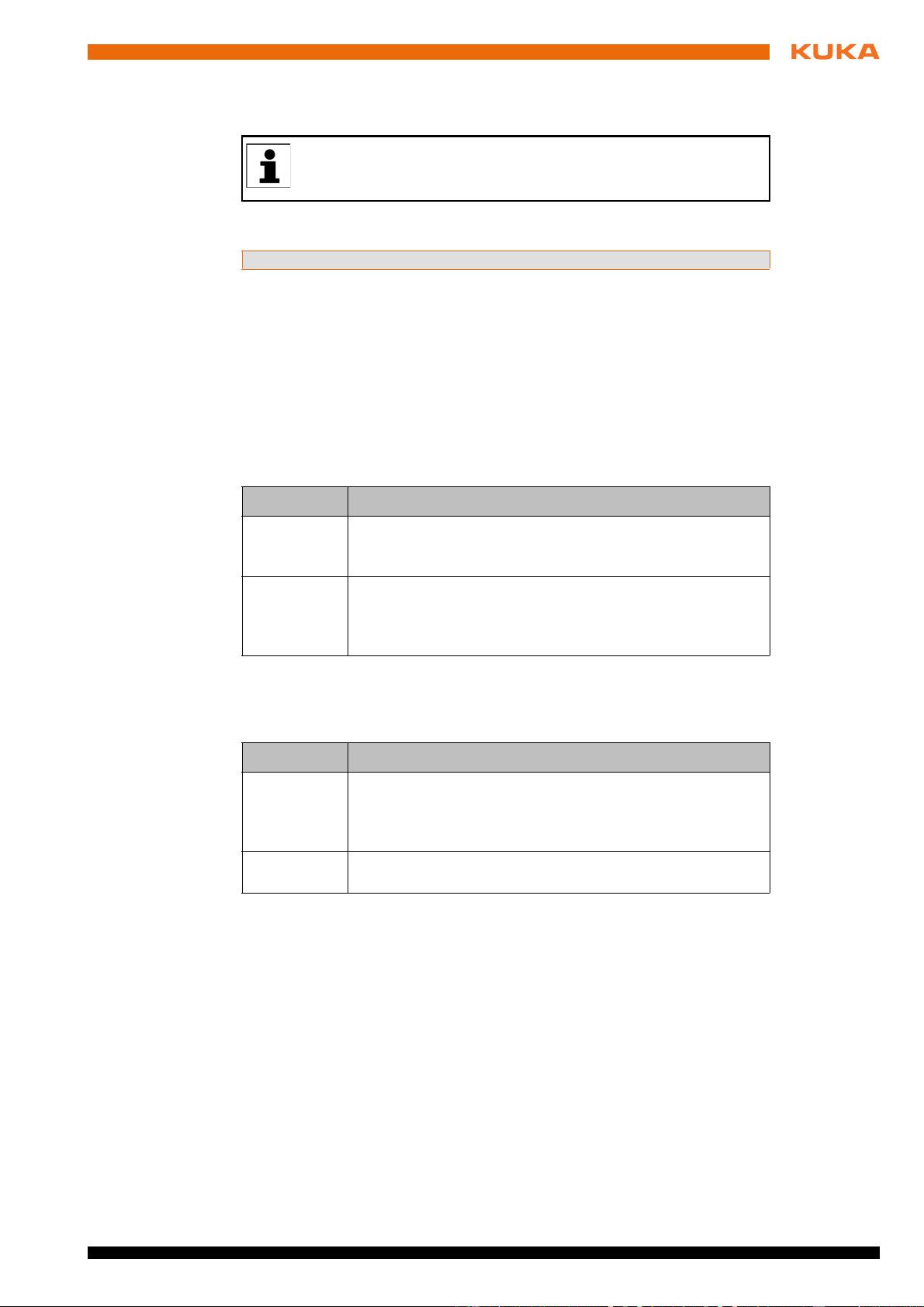
Description CWRITE can be used to perform operations on the file system via the com-
mand channel. Example: Open a file via the command channel and write a
character or a character string into the file.
The file system functions can be called from a robot interpreter program or
from a submit interpreter program. It is not permissible to open a file from one
interpreter and then access it from the other interpreter, e.g. to write to it or to
close the file again.
When a file system function is called, a specific number of parameters are
transferred to this function. Each of these functions supplies a return value via
CWRITE. The return value indicates whether the function was executed suc-
cessfully or aborted with an error. In the case of an error, the returned error
number can be used to localize the cause.
(>>> 8.1 "Error writing to the command channel $FCT_CALL" Page 55)
CREAD is not relevant for the command channel.
Configuration The command channel does not need to be configured for communication with
CWRITE.
Overview
Fig. 4-2: Communication via the command channel $CMD
Fig. 4-3: Communication via the command channel $FCT_CALL

剩余66页未读,继续阅读
1647 浏览量
1536 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

fresher12364
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面解读ARM与Thumb指令集PDF资料
- 深入了解Microsoft.ReportViewer.WebForms报表开发
- Struts2与Spring、Hibernate、IBatis集成使用
- 跨平台的YUV转JPEG图像转换工具开发
- Android TextView文字自动对齐及间隔设置技巧
- 实现无刷新用户名占用检测的ASP+Ajax技术
- Java+MySQL实现的学生与教师信息管理功能详解
- MATLAB电力系统潮流计算工具:matpower3.2
- EXCEL制作动态对联动画教程
- C#简单实现笔记本电源状态检测方法
- 提升效率:IE浏览器JS调试的必备工具指南
- Android开发离线文档指南
- 适用于iOS8及以上版本的毛玻璃特效Demo
- 广东工程职业技术图书馆管理系统开发与应用
- 全面的C语言编程技术与库资料大全
- 全面兼容PC与手机的HTML5图片上传预览功能






















