AUTOSAR CAN接口规范:中文翻译版
需积分: 18 17 浏览量
更新于2024-07-16
收藏 3.18MB PDF 举报
"AUTOSAR_SWS_CANInterface.pdf 是一份关于AUTOSAR(AUTomotive Open System ARchitecture)中CAN(Controller Area Network)接口规范的文档,已经进行了部分中文翻译。该文档主要针对AUTOSAR 4.2.2版本,详细阐述了CAN接口的规格和功能。"
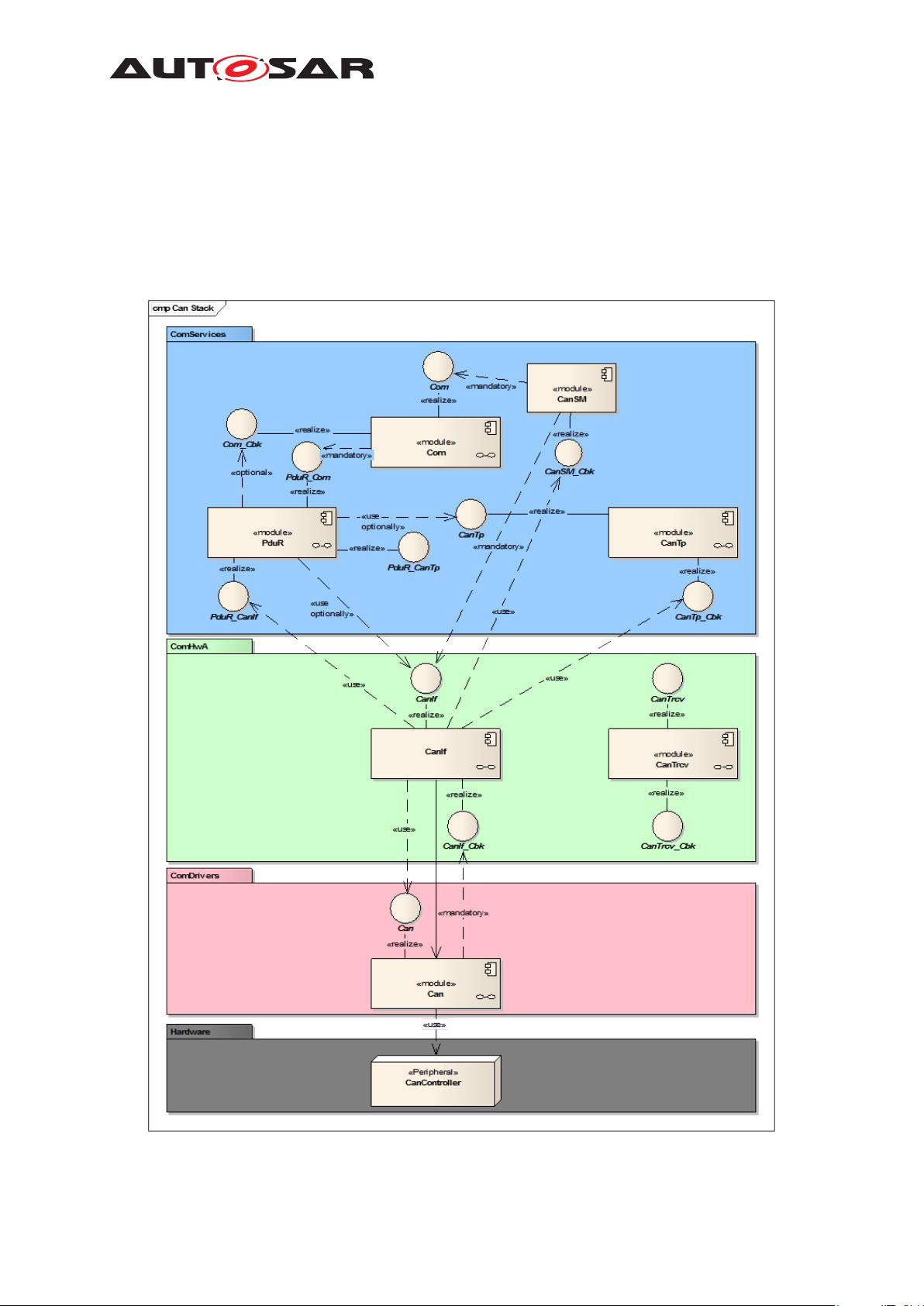
在AUTOSAR架构中,CAN接口是关键组件之一,用于汽车电子系统中的通信。此规范主要涵盖了以下几个方面:
1. **CAN Interface 规范**:定义了AUTOSAR系统中CAN接口的接口行为、数据传输和管理机制,确保不同模块之间能够正确地进行CAN通信。
2. **CAN FDS支持**:从4.2.1版本开始,文档增加了对CAN Flexible Data-Rate (CAN FD) 的全面支持,CAN FD允许更高的数据速率和更大的数据长度编码(DLC),提高了通信效率。
3. **全局时间同步**:4.2.2版本中,引入了通过CAN总线实现全局时间同步的功能,这对于实时性和高精度的车载网络至关重要,尤其是涉及到传感器数据同步的应用。
4. **取消传输确认**:在4.2.2版本中移除了CanIf_CancelTxConfirmation函数,这可能是为了简化API并优化系统性能。
5. **Wakeup、Buffering和Transmit Variants**:文档澄清了唤醒机制、缓冲策略以及不同传输变体的处理方式,这些对于低功耗和高效能的系统设计至关重要。
6. **ICOM支持**:从4.1.3版本开始,ICOM(Intercomponent Communication,组件间通信)的支持被设为可选,这给予了系统设计者更多的灵活性。
7. **PDU模式**:4.1.2及以后的版本对PDU(Protocol Data Unit,协议数据单元)模式进行了限制和改进,例如PduModesa,以适应不同的通信需求和场景。
8. **去除BSW Exclusive Areas**:4.1.3版本移除了基础软件(BSW)的独占区域,这可能意味着对BSW的组织和资源管理进行了优化。
9. **编辑性改动**:每个版本更新都包含了对文档结构和表述的改进,以提高可读性和理解性。
10. **重型车辆支持**:4.1.1版本添加了对重型车辆标准J1939的支持,这意味着CAN接口可以适应不同类型的汽车应用。
总体来说,这个文档详细描述了如何在AUTOSAR环境中有效地利用CAN接口进行汽车电子设备间的通信,涵盖了从基本的CAN到高级的CAN FD,以及相关的同步和管理功能。这些规范对于理解和开发AUTOSAR系统中的CAN通信模块非常重要。

Specification of CAN Interface
AUTOSAR Release 4.2.2
4 Constraints and assumptions
4.1 Limitations
The CAN Interface can be used for CAN communication only and is specifically de-
signed to operate with one or multiple underlying CAN Drivers and CAN Transceiver
Drivers. Several CAN Driver modules covering different CAN Hardware Units are rep-
resented by just one generic interface as specified in the CAN Driver specification [1].
As well in the same manner several CAN Transceiver Driver modules covering different
CAN Transceiver devices are represented by just one generic interface as specified in
the CAN Transceiver Driver specification [2, Specification of CAN Transceiver Driver].
Other protocols than CAN (i.e. LIN or FlexRay) are not supported.
Please be aware that an active PnTxFilter ensures that the first messages on bus
is CanIfTxPduPnFilterPdu. In case that CanIfTxPduPnFilterPdu is the NM-PDU the
COM-Stack start up takes care that the PduGroups are disabled until successful trans-
mission of that PDU. However, transmit requests for other PDUs (i.e. initially started
PDUs, TP-PDUs, XCP-PDUs) will be rejected until the configured PDU was sent.
4.2 Applicability to car domains
The CAN Interface can be used for all domain applications when the CAN protocol is
used.
16 of 215
— AUTOSAR CONFIDENTIAL —
Document ID 012: AUTOSAR_SWS_CANInterface



剩余214页未读,继续阅读
2024-01-30 上传
2023-09-03 上传
2023-05-08 上传
2023-03-30 上传
2023-08-21 上传
2023-12-08 上传

zwmyxfbenet
- 粉丝: 4
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
