自平衡人形机器人:控制系统设计与实现策略
PDF格式 | 270KB |
更新于2024-08-28
| 104 浏览量 | 举报
本文档主要探讨了一种自平衡人形机器人的动作控制器的设计与实现。移动式机器人因其结构简单、可控性强和成本效益高,在现代工业、医疗、娱乐等领域有着广泛应用,其中轮式自平衡机器人作为一类特殊的移动机器人,因其独特的动态平衡特性而备受关注。自平衡机器人通过水平配置的两个轮子,利用自身的不稳定性和灵活性,需要精确的控制策略来维持动态平衡。
在静止时,机器人会因为物理特性而自然倾向一边,但在运动过程中,姿态传感器扮演关键角色,实时监测车体的倾倒角度和倾倒角速度。根据这些数据,动作控制器通过控制伺服电机的电压转向和转速,确保机器人能够稳定地行走。然而,现有的自平衡机器人往往存在成本较高的问题,限制了其大规模应用。
为了改进这一情况,本文提出了一种创新的动作控制器设计方案。这个控制器采用了多层次的控制管理,将主处理器的任务处理命令分配到三个16位超低功耗单片机(MSP430F149)上,实现了高效且节能的控制架构。这样做的好处在于,一方面可以降低能耗,提高系统效率,另一方面也确保了对机器人多关节和多自由度的精细动作控制,包括自平衡控制,使其在复杂环境中表现出更好的适应性和稳定性。
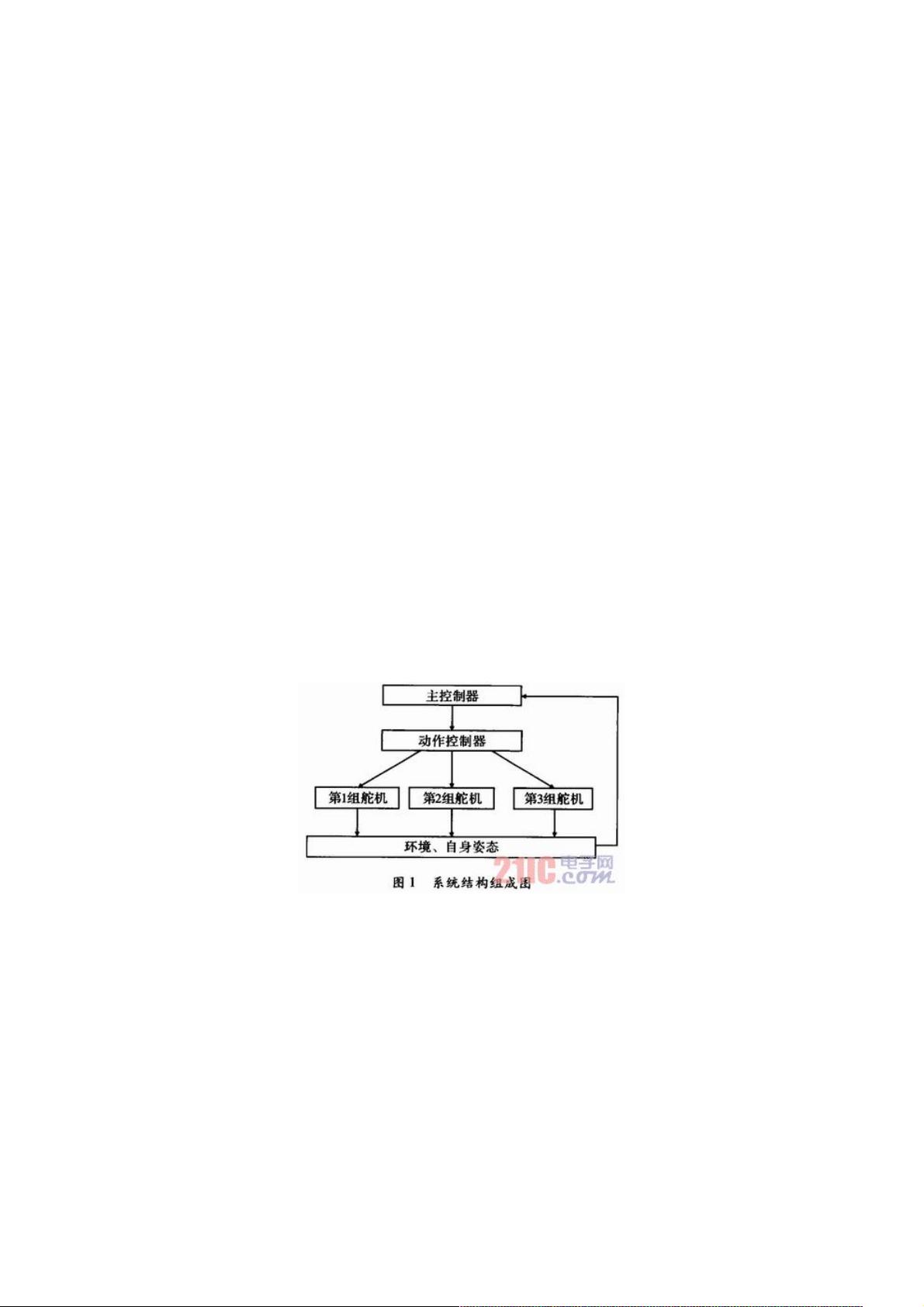
动作控制器的核心设计包括反馈控制系统,如图1所示,它确保机器人能够基于实时的环境和自身状态信息做出反应。控制器与执行元件(如舵机)之间的接口设计也是关键,它负责将主控制器的指令转化为适合执行机构的实际操作信号。这种设计考虑到了机器人动作的实时性和精确性,使得动作控制器在自平衡人形机器人系统中扮演了至关重要的角色,为机器人提供了强大的动态性能和成本效益优化。
一种自平衡人形机器人动作控制器的设计和实现一种自平衡人形机器人动作控制器的设计和实现
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,
成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就
是说,自平衡机器人在静止状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过
一定的控制策略使它达到动态平衡。 由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱
好者设计了多种结构、外观各异的自平衡机器人,尝试采用各种控制策略使其达到自平衡控制。通常这类机器
人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当前机器人姿态控制伺服电机驱动电压的转
向和转速,从而使机器人
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为移动式
机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就是说,自平衡机器人在静止
状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过一定的控制策略使它达到动态平衡。
由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱好者设计了多种结构、外观各异的自平衡机器人,尝
试采用各种控制策略使其达到自平衡控制。通常这类机器人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当
前机器人姿态控制伺服电机驱动电压的转向和转速,从而使机器人保持平衡。该方式制作的自平衡机器人虽然控制性能良好,
但成本高,不适合广泛推广。为解决机器人动作控制而设计的,它将主处理器发出任务处理命令分配到3个16位超低功耗单片
机(MSP430F149)上去执行,实现多层次的控制管理。该人形机器人具有多关节,多自由度,自平衡的控制需求,需要动
作控制器在机器人系统控制中起到关键性的作用。
1 动作控制器的设计动作控制器的设计
1.1 体系结构体系结构
自平衡人形机器人需要获取不可预知的环境信息以及自身姿态信息进行综合运算并及时进行自身姿态的调整。机器人的这
种行为特点决定了机器人的整体控制结构要采用反馈控制。如图1所示,描述了这种反馈控制结构的硬件实现。
同时,在图1中可见从机器人主控制器到执行元件(舵机)之间,有一层动作控制器的结构。这一层结构的任务是实现控
制命令到舵机控制信号之间的功能转换,这种体系结构的设计,就是借鉴计算机系统结构中的分层结构体系思想。采用这种分
层的结构,实现了软件和硬件、命令和动作的相对隔离。其突出的优点体现在能够使主控制器专注于数据的处理,而对下行设
备只负责发送指令,对于硬件的复杂的操作时序,由动作控制器负责产生。
1.2 实现过程实现过程
1.2.1 硬件实现硬件实现
为满足机器人整体控制体系结构中指令到执行的层次性要求,动作控制器需要完成命令解析,信号驱动等任务。如图2描
述了动作控制器内部的结构,其主要由串行总线、3个可并行工作的16位单片机、信号驱动部分构成。这种结构能够从总线接
收命令,单片机进行指令解析并输出控制电信号,外部电路对控制信号驱动放大,从而分别实现对执行舵机的控制。图3为动
作控制器中一个单片机工作模块的硬件原理图。
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐

weixin_38711778
- 粉丝: 2
- 资源: 895
 我的内容管理
展开
我的内容管理
展开







最新资源
- android-showcase
- 科巴
- nacos-2.2.4
- Resume-and-Cover-Letter:我用 HTML 和求职信生成器编写的简历版本。 在此处查看简历导出
- Form-2
- 新人培训课程体系
- PicBed:用于在md中上传图片
- homu.homu-api
- 客户投诉处理管理规定
- 盖茨比·卡斯珀
- rt-thread-code-stm32f407-st-discovery.rar,stm32f407-st-discovery
- gadoory
- 电子功用-开关型直流-直流电源转换器
- Circall:Circall是一种从配对末端RNA测序数据中发现环状RNA的新颖方法
- SETView:实现 NewsAPI 以与技术新闻交互并显示技术新闻的 Web 应用程序
- java调用dll详解.rar
