基于卡尔曼滤波与启发式算法的机动目标跟踪与反跟踪策略
版权申诉
199 浏览量
更新于2024-07-04
收藏 2.26MB PDF 举报
"《规划问题算法-3机动目标的跟踪与反跟踪》是一篇专注于解决机动目标跟踪与反跟踪问题的研究论文。文章针对两个关键问题进行了深入探讨:
1. 目标跟踪与数据融合:针对雷达量测数据,作者首先进行了预处理,包括将目标运动状态从空间极坐标转换到地球直角坐标系,利用线性插值对数据进行时间同步,并通过加权融合雷达2和雷达3的量测值。加权融合考虑了雷达测距、方位角和俯仰角的误差,依据误差的标准差比例计算出权重,确保融合数据的准确性。接着,构建了协同转换模型和变加速Singer模型,运用扩展卡尔曼滤波(IMM-EKF)技术进行实时目标跟踪,得到目标的估计航迹、速度和加速度。通过对加速度的统计分析,识别出目标在特定时间段内的机动转弯运动模式。
2. 数据关联算法:对于Data2.txt中的目标量测数据,文章提出了一种启发式动态规划数据关联算法。该算法处理雷达连续扫描期间接收到的观测值,通过速度和角度(包括方位角和俯仰角)域的判断,有效减少误关联,实现目标航迹的稳定和可靠关联。即使在缺乏目标先验信息的情况下,算法也能保持高效和实时性。
3. 目标运动状态建模与跟踪:针对Data3.txt中的目标状态数据,论文进行了空间极坐标到雷达质心直角坐标系的转换,基于转换后的点迹特征,再次构建机动模型并采用IMM-EKF进行跟踪,最终获取目标的精确估计状态。
这篇论文结合实际数据处理和先进的滤波技术,深入剖析了机动目标跟踪与反跟踪的关键问题,提供了有效的算法策略,对于实际的雷达监控和军事应用具有重要的理论指导价值。"
- 9 -
cos 0 sin
0 1 0
sin 0 cos
yy
y
yy
AA
AA
T
(6)
cos sin 0
sin cos 0
0 0 1
zz
z z z
AA
AA
T
(7)
其中,
0
x
A
,
270
y
AB
,
360
z
AL
。
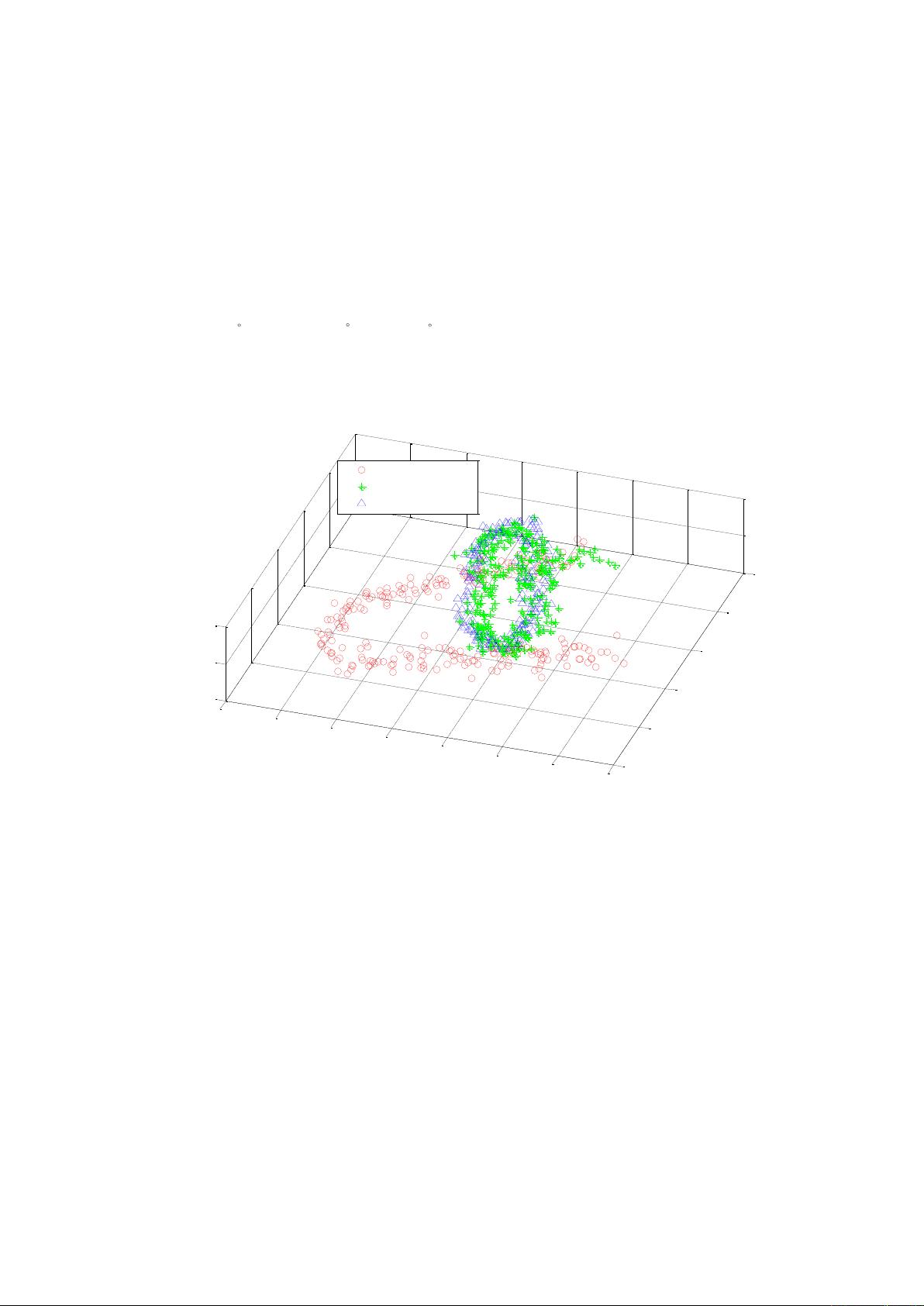
图 6 给出了经坐标转换后在地球直角坐标系下三部雷达对目标的测量点
迹。
-2.596
-2.594
-2.592
-2.59
-2.588
-2.586
x 10
6
4.064
4.066
4.068
4.07
4.072
4.074
4.076
4.078
x 10
6
4.15
4.16
4.17
x 10
6
X轴 / m
Y轴 / m
Z轴
/ m
雷达1测量点迹
雷达2测量点迹
雷达3测量点迹
图 6. 地球直角坐标系下各雷达对目标的测量点迹
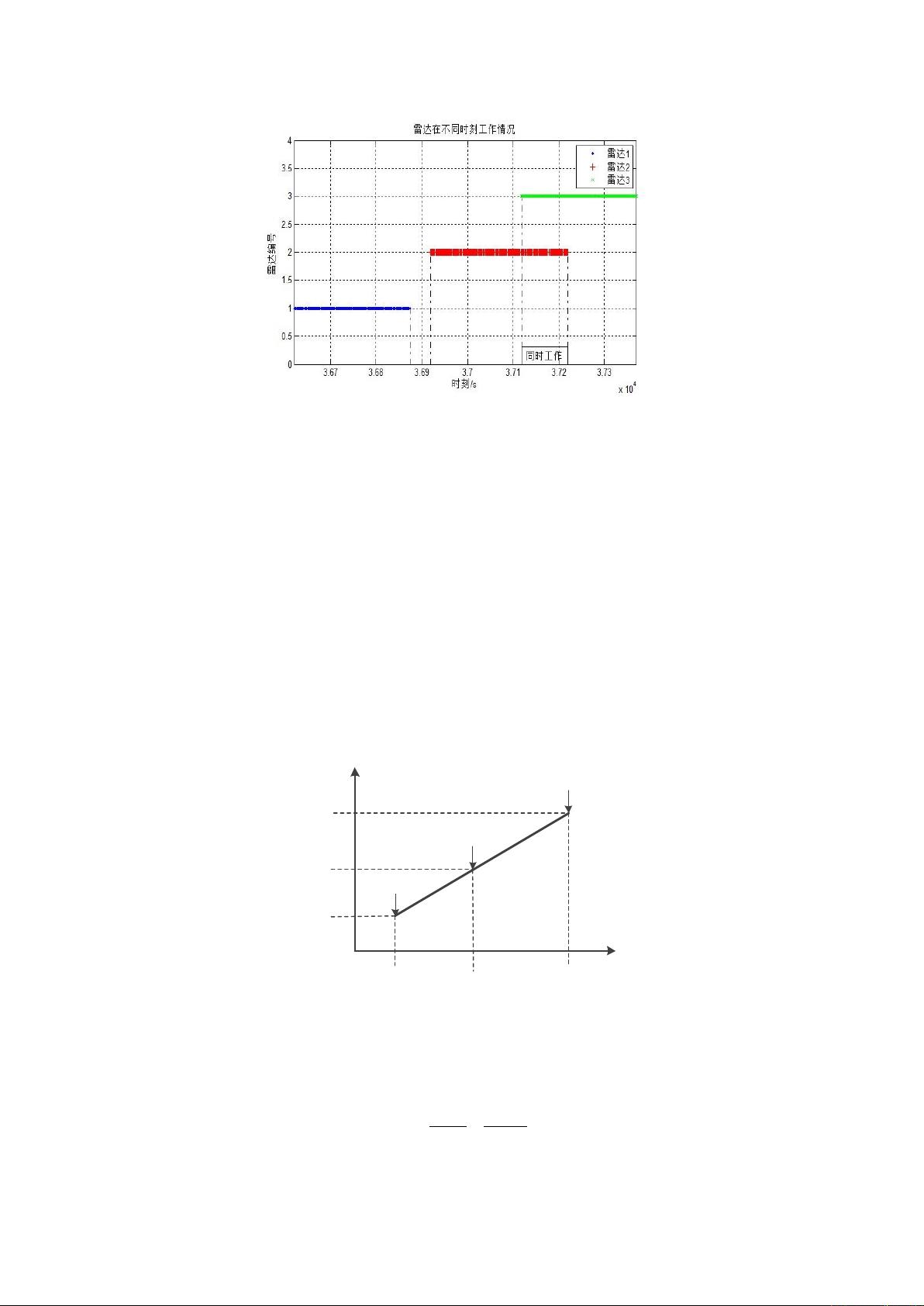
(2) 通过线性插值进行时间对准
根据 Data1.txt 中所给数据,绘制三部雷达的工作序列。从图 7 中可以看到,
三台雷达对同一目标的观测时刻不完全一样。其中雷达 1 最先单独工作,雷达
1 结束工作后一段时间雷达 2 才开始观测,随后雷达 3 开始观测且与雷达 2 共
同工作一段时间,在雷达 2 结束观测后雷达 3 又继续观测一段时间。另外,三
部雷达在工作的过程中均出现不同程度的数据丢失现象。
剩余41页未读,继续阅读
2022-05-01 上传
2022-05-02 上传
2022-05-02 上传
2021-11-30 上传
2022-07-12 上传
2022-05-09 上传
2022-05-06 上传

普通网友
- 粉丝: 13w+
- 资源: 9195
 我的内容管理
展开
我的内容管理
展开







最新资源
- node-silverpop:轻松访问Silverpop Engage API的Node.js实现
- 最小宽度网格图绘制算法研究
- 多数据源事务解决方案:统一管理单应用中的多数据库
- 利用Next.js匿名浏览Reddit子板块图片
- SpringBoot+H5官网模板,覆盖多种网页资源播放
- Gitshots-server:简化开源贡献的提交记录服务
- Scrapy-Dash工具:轻松生成Scrapy文档集
- Node.js v18.12.0发布,优化Linux PPC64LE服务器性能
- 蚂蚁设计专业版快速使用指南与环境配置
- Vue.js 2.3.4源码解读及开发环境配置指南
- LDBase:Lazarus开发者的dbf数据库管理开源工具
- 高效部署WordPress的VENISON脚本教程
- Saffron Bahraman-crx插件:控制产品线的栽培与培养
- Gitpod中运行前后端应用程序的指南
- Node.js v20.3.0新版本发布 - 开源跨平台JavaScript环境
- 掌握非线性方程根的迭代求解-Matlab方法实现
