MeshLab入门指南:英文文档推荐与步骤详解
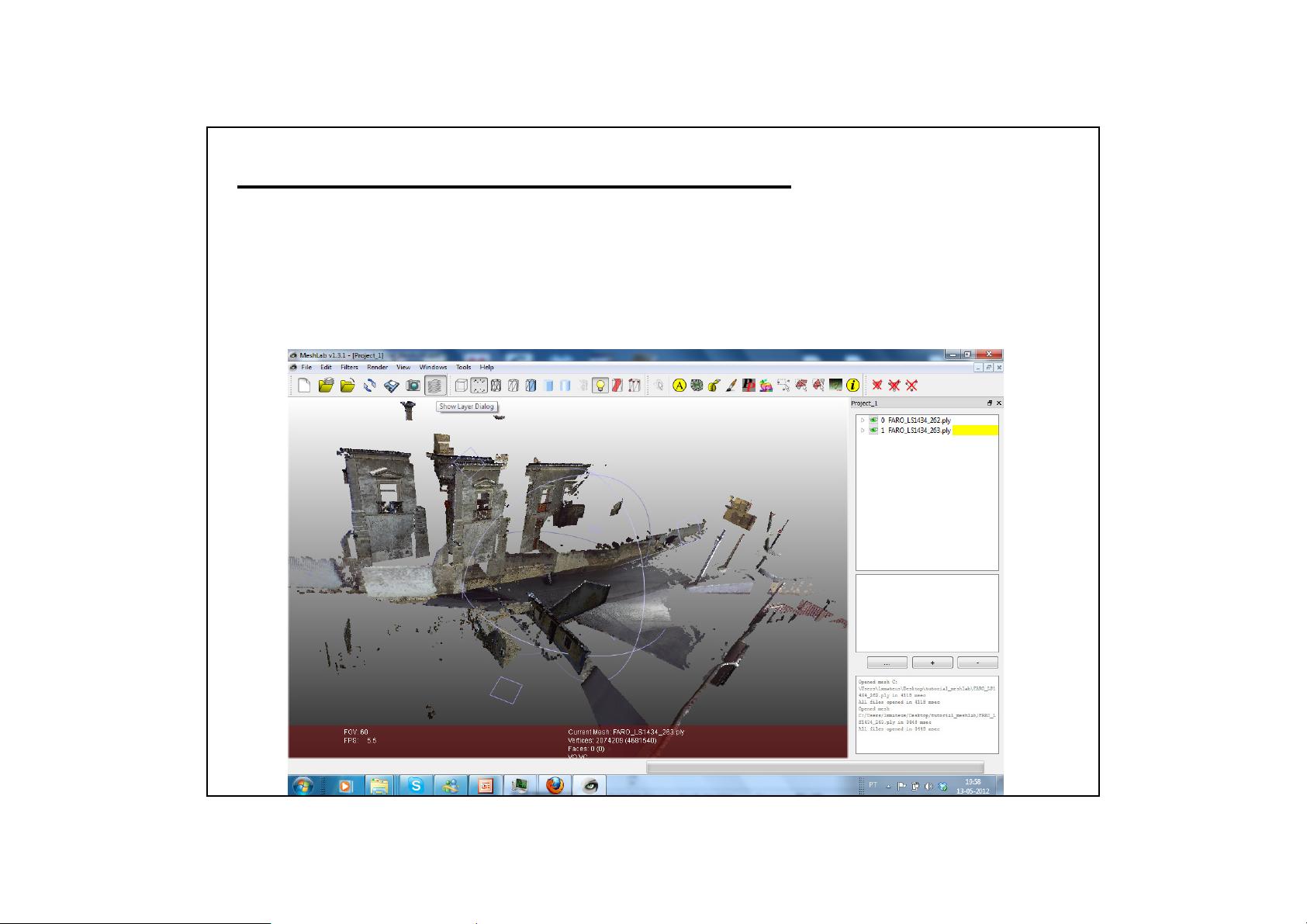
MeshLab 是一款强大的三维几何处理软件,它在点云和网格编辑方面具有广泛的应用。这篇教程针对初学者介绍了如何在 MeshLab 和文本编辑器 Notepad++ 中打开和处理点云数据。
首先,点云是一种三维数据结构,由一系列点的坐标组成,每个点包含了位置、法线(表示表面的法线方向)、颜色(通常以 RGB 格式)以及质量参数等信息。PLY(Polygon File Format)是常见的点云文件格式,其 ASCII 和二进制编码各有优缺点:ASCII 编码便于手动编辑,但文件大小较大;二进制编码则能减小文件体积,但内容不可直接修改。
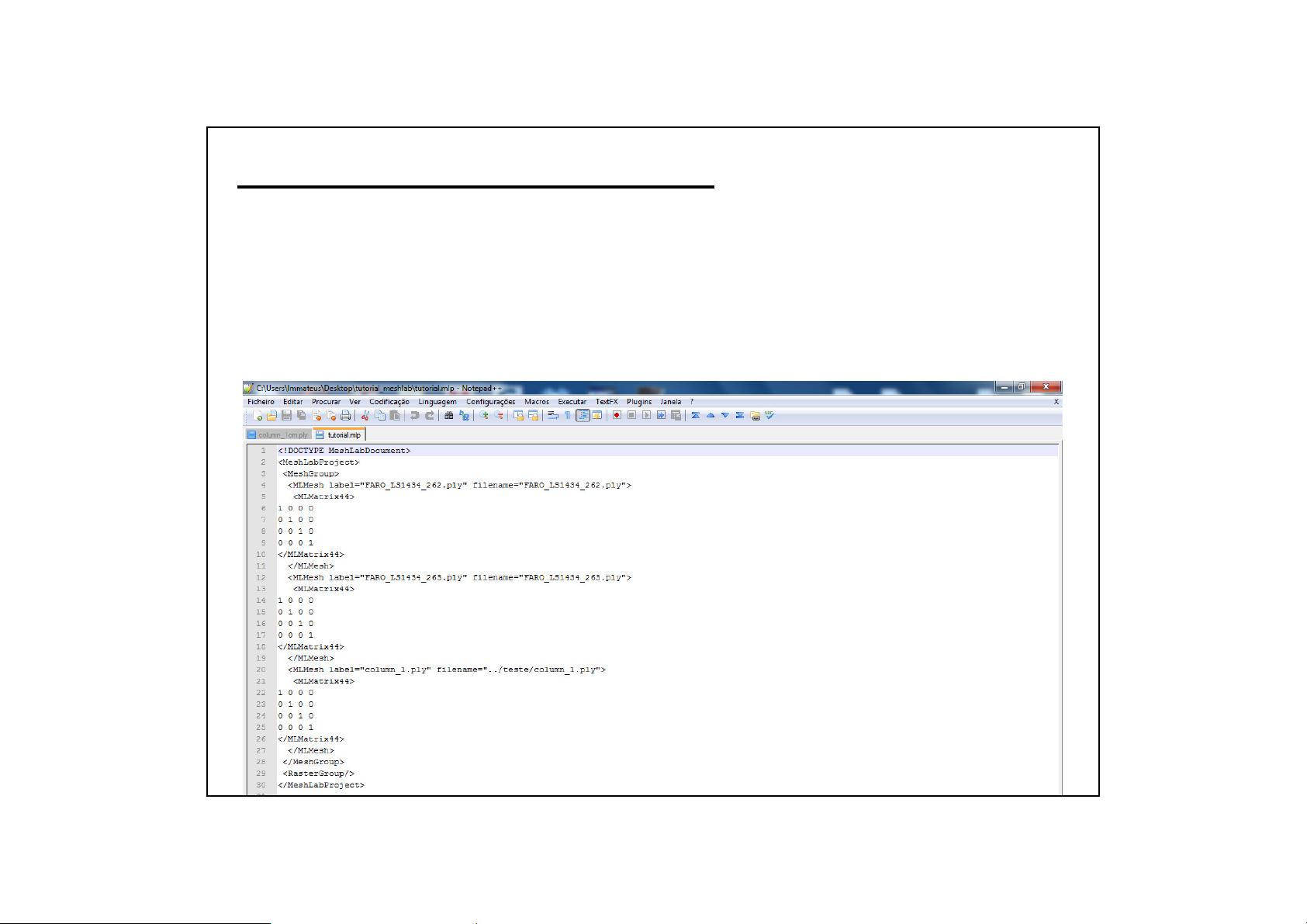
在 Notepad++ 中打开 PLY 文件时,可以查看文件头信息,包括顶点数量、坐标顺序以及可能存在的面的数量。值得注意的是,如果文件中没有包含面,那么我们主要关注的是顶点和附加信息,如法线和颜色。
另一种常用工具是 CloudCompare,这是一款无需安装的开源点云处理软件。通过 CloudCompare,用户可以直接加载、查看和操作点云,进行诸如分割、过滤、配准等高级操作。该软件界面直观,适合对点云数据进行预处理和初步分析。
步骤1:在 Notepad++ 中打开点云文件(例如以 .ply 结尾的文件),熟悉文件结构和内容。
步骤2:理解点云中的关键属性,如位置、法线、颜色和质量参数。
步骤3:在 CloudCompare 中导入点云,利用其丰富的功能进行点云处理和可视化。
步骤4:学习如何使用 MeshLab 进行更复杂的几何操作,如表面重建、纹理映射和模型优化。
步骤5:对于二进制编码的点云,可能需要借助特定工具或方法将其转换为可编辑的格式,以便于修改某些属性。
这篇教程不仅提供了MeshLab和Notepad++的基本操作指南,还为使用CloudCompare处理点云提供了一种实用路径。通过这些工具,用户能够有效地管理和分析三维空间中的点云数据,从而在计算机图形学、地理信息系统等领域实现各种应用。
8
NAVIGATION IN MeshLAB
1. Left mouse button + drag: rotate around trackball center
2. Mouse wheel: move forward or backward
3. Center mouse button + drag: pan
4. Shift + mouse wheel: change camera field of view
5. Double click on specific point: places that point at the trackball center
6. Control + mouse wheel: moves near clipping plan
7. Control + Shift + mouse wheel: moves far clipping plan
8. Alt + Enter: enter full screen mode
9. Control + Shift + left mouse button + drag: changes light direction (this
only takes effect if there are normals)
VISUALIZATION OPTIONS IN MeshLAB
Appearance options can be found under the menu TOOLS.
Other appearance and info options can be found under the menu VIEW.
Also explore the menu RENDER to change lighting, shaders, render mode
and color.
剩余45页未读,继续阅读
194 浏览量
298 浏览量
461 浏览量
742 浏览量
331 浏览量
311 浏览量
2014-05-08 上传

chx_man
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- MFC2000-3A型微机厂用电快速切换装置使用说明书
- JavaScript+语言精髓与编程实践.pdf
- Pascal基础教程
- VC++6.0 MFC类库(中文版)
- router OS 功能介绍
- 电脑 小技巧 (让你使用电脑更轻松)
- 多线程编程指南.pdf
- ASP.NET与Web Service实例剖析中文版
- Optimizations od a MIMO relay network
- C案例分析-开发综合程序
- Iterative waterfilling for Gaussian vector multiple access channel
- 非常实用和详细介绍的mib信息库文件
- Infrastructure relay transmission with cooperative MIMO
- 巨著《管理学原理》PDF版
- oracle sql 优化
- Mutual information and minimum mean sqaured error in Gaussian channel
