库卡机器人编程详解:V8.2系统全面指南
需积分: 49 24 浏览量
更新于2024-07-18
7
收藏 8.7MB PDF 举报
库卡机器人编程手册是一份由库卡机器人有限公司(KUKARoboterGmbH)发布的详细指南,用于教授用户如何操作和编程其先进的机器人系统。这份文档适用于库卡系统软件8.2版本,发布日期为2011年10月13日,标题是"COLP1KSS8Roboterprogrammierung1V1zh",是一份针对库卡机器人的基础教程。
该手册涵盖了多个核心主题,包括:
1. **机器人技术入门**:首先介绍机器人技术的基本概念,让读者对机器人操作有所了解,为后续编程奠定基础。
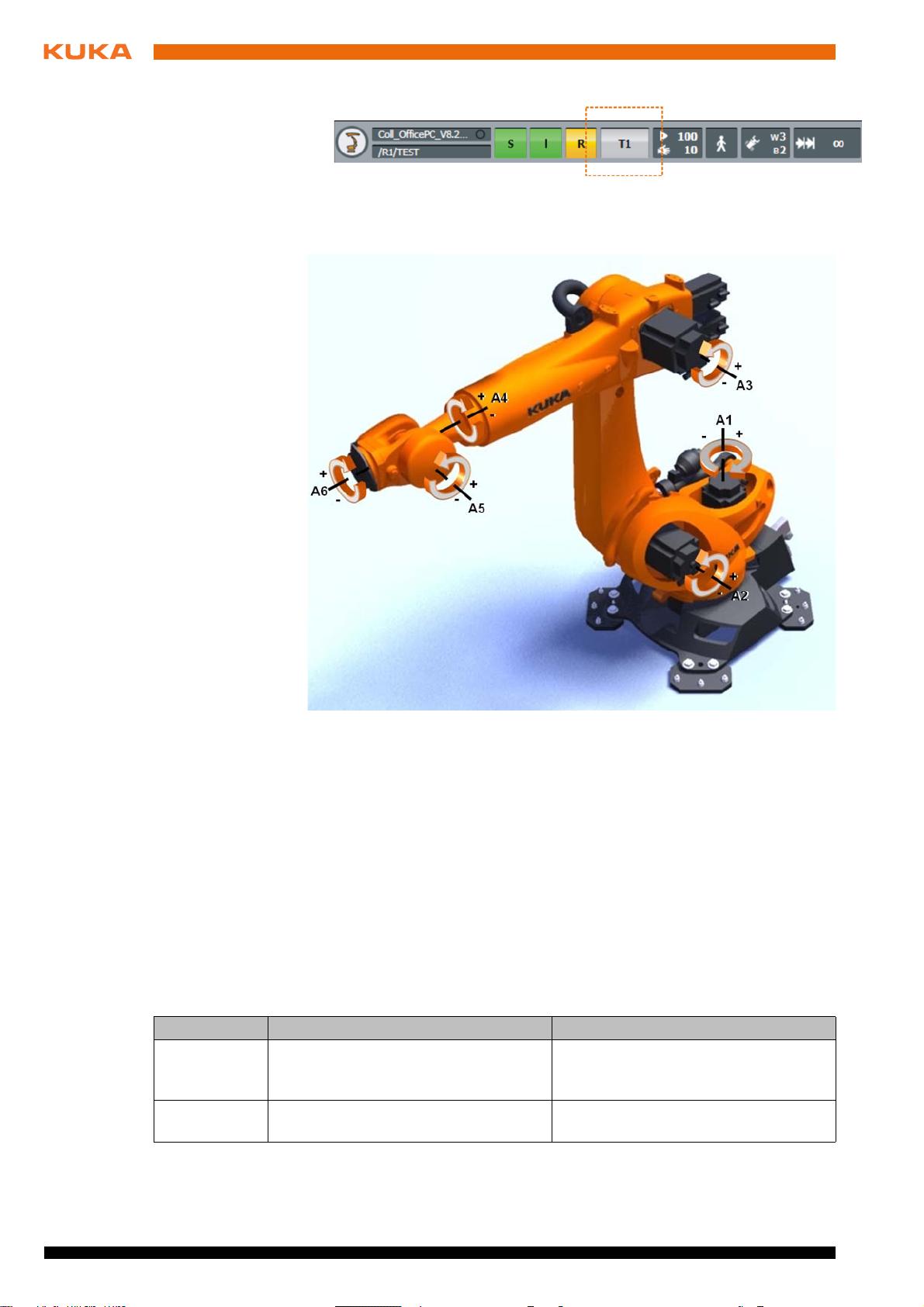
2. **库卡机器人的机械系统**:详细解释了库卡机器人的机械构造,包括关节、轴等组成部分,帮助用户理解机器人的物理结构。
3. **机器人控制系统 (V) KRC4**:重点阐述了KUKA机器人的控制系统,包括其功能、界面和操作方法,这是编程的核心部分。
4. **KUKAsmartPAD**:smartPAD是库卡机器人的交互界面,通过该设备用户可以可视化地监控和控制机器人,手册介绍了其基本操作和功能。
5. **smartPAD概览**:深入探讨smartPAD的操作界面设计,以及如何利用它进行编程和调试。
6. **机器人编程**:这部分详细讲解了编程步骤,包括编写、测试和调试程序,对于初学者和进阶用户来说都是关键内容。
7. **机器人安全性**:强调了在编程和操作过程中遵守的安全规则,确保了用户和周围环境的安全。
8. **机器人运动控制**:涉及具体运动指令,如读取并解释机器人信息提示,选择运行模式,以及在世界坐标系、工具坐标系和基坐标系中的精确运动控制。
9. **坐标系管理**:讨论了与机器人运动相关的坐标系,如世界坐标系、工具坐标系和基坐标系,这对于实现精准定位和工作空间管理至关重要。
此外,手册指出,尽管文档中列出的功能是基于特定版本,但控制系统可能还有其他未详述的功能。在复制或分享文档时,必须获得库卡公司的明确许可,且用户需意识到可能存在版本更新或技术更改,因此建议查阅最新官方资料以确保信息的准确性。
这份库卡机器人编程手册提供了全面的指导,无论是初次接触库卡机器人还是寻求提升现有技能的工程师,都能从中获益良多。

16 / 165 发布日期 :13.10.2011 版本 :COL P1KSS8 Roboterprogrammierung 1 V1 zh
机器人编程 1
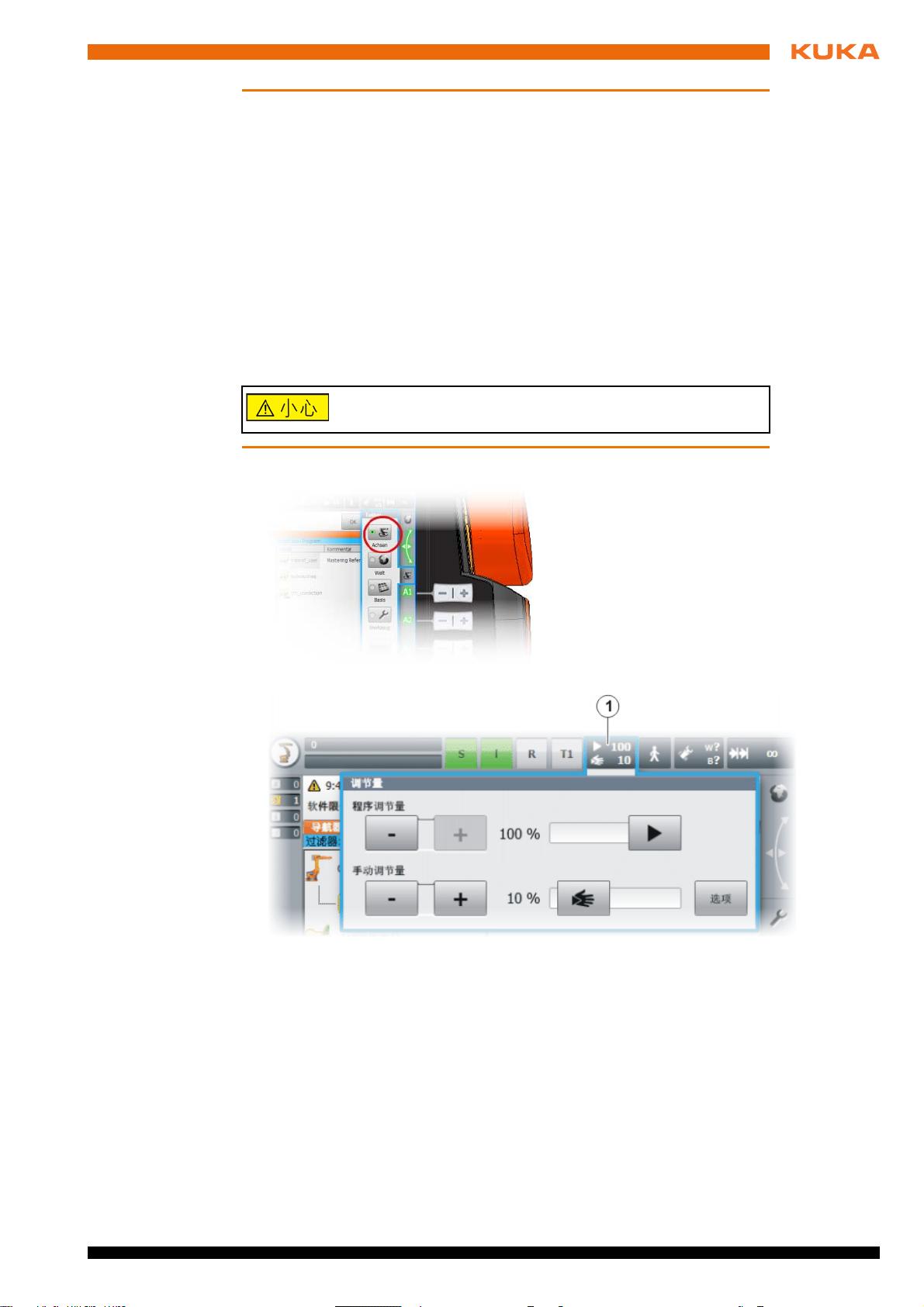
信息提示处理 信息提示中始终包括日期和时间,以便为研究相关事件提供准确的时间。
观察和确认信息提示的操作步骤。
1. 触摸信息窗口 (1) 以展开信息提示列表。
2. 确认:
用“OK” (2) 来对各条信息提示逐条进行确认
或者: 用 “ 全部 OK” (3) 来对所有信息提示进行确认
3. 再触摸一下最上边的一条信息提示或按屏幕左侧边缘上的 “X” 将重新关闭
信息提示列表。
2.2 选择并设置运行方式
KUKA 机器人的运
行方式
T1 (手动慢速运行)
用于测试运行、编程和示教
程序执行时的最大速度为 250 mm/s
手动运行时的最大速度为 250 mm/s
T2 (手动快速运行)
用于测试运行
程序执行时的速度等于编程设定的速度!
手动运行: 无法进行
AUT (自动运行)
用于不带上级控制系统的工业机器人
程序执行时的速度等于编程设定的速度!
手动运行: 无法进行
AUT EXT (外部自动运行)
用于带上级控制系统 (PLC)工业机器人
程序执行时的速度等于编程设定的速度!
手动运行: 无法进行
运行方式的安全提
示
手动运行 T1 和 T2
手动运行用于调试工作。 调试工作是指所有为使机器人系统上可进入自动运行
模式而必须在其上所执行的工作,其中包括:
示教 / 编程
在点动运行模式下执行程序 (测试 / 检验)
对信息处理的建议:
有意识地阅读!
首先阅读较老的信息。 较新的信息可能是老信息产生的后果。
切勿轻率地按下 “Alle OK”。
尤其是在启动后: 仔细查看信息。 在此过程中让所有信息都显示出来
(按下信息窗口即扩展信息列表)
图 2-2: 确认信息


剩余164页未读,继续阅读
2891 浏览量
点击了解资源详情
359 浏览量
550 浏览量
136 浏览量

weixin_43099710
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







