"深入理解视觉SLAM系统:算法概要与应用案例探究"
需积分: 5 23 浏览量
更新于2024-04-02
收藏 4.38MB PPTX 举报
第9章《视觉SLAM系统》是机器人技术领域中的重要内容之一,涉及到机器人在环境中进行自主导航和定位的关键技术。本章内容主要包括几种常见的视觉SLAM算法,其中包括特征点法、直接法和半直接法等。与传统的激光SLAM系统相比,视觉SLAM系统具有一定的优势和劣势。视觉SLAM系统可以通过摄像头捕捉环境中的图像信息,利用计算机视觉算法来实现定位和建图,相对于激光雷达系统价格更低廉,同时具有更广泛的适用性。然而,视觉SLAM系统对环境的要求更高,需要保证环境足够光线充足、没有遮挡物等条件下才能正常工作。
在本章中,介绍了几种常见的视觉SLAM算法,包括ORB-SLAM2算法、LSD-SLAM算法和SVO算法等。这些算法通过对图像特征的提取和匹配,以及对相机运动和场景结构的估计,实现了机器人在未知环境下的定位和建图。其中,ORB-SLAM2算法是一种基于关键点的SLAM算法,具有较高的定位精度和实时性,适用于在室内环境中进行导航和建图。LSD-SLAM算法则是一种基于稀疏直接法的SLAM算法,通过对图像亮度梯度的处理,实现了对机器人运动的跟踪和建图。SVO算法则是一种基于半直接法的SLAM算法,兼顾了特征点和像素之间的匹配关系,适用于在光照变化较大的环境中进行定位和建图。
除了介绍各种视觉SLAM算法的原理和特点,本章还讨论了视觉SLAM系统相对于激光雷达系统的优缺点。视觉SLAM系统在价格和适用性上具有一定的优势,但是对环境的要求更高,容易受到光照、遮挡等因素的影响。因此,在实际应用中需要根据具体的场景和需求选择合适的SLAM系统。最后,本章还介绍了几种典型的视觉SLAM系统,包括ORB-SLAM2、LSD-SLAM和SVO等系统,通过对比它们的特点和性能,帮助读者更好地理解和应用视觉SLAM技术。
综上所述,第9章《视觉SLAM系统》是机器人领域中的重要内容,涵盖了多种视觉SLAM算法和系统的原理和实现方法。通过深入学习和理解本章内容,读者可以掌握视觉SLAM技术的核心知识,为机器人在未知环境中进行自主导航和定位提供技术支持。同时,本章还提出了对于视觉SLAM系统的发展和应用的展望,为读者进一步研究和实践提供了重要的参考和指导。
9.1 ORB-SLAM2算法
5/38
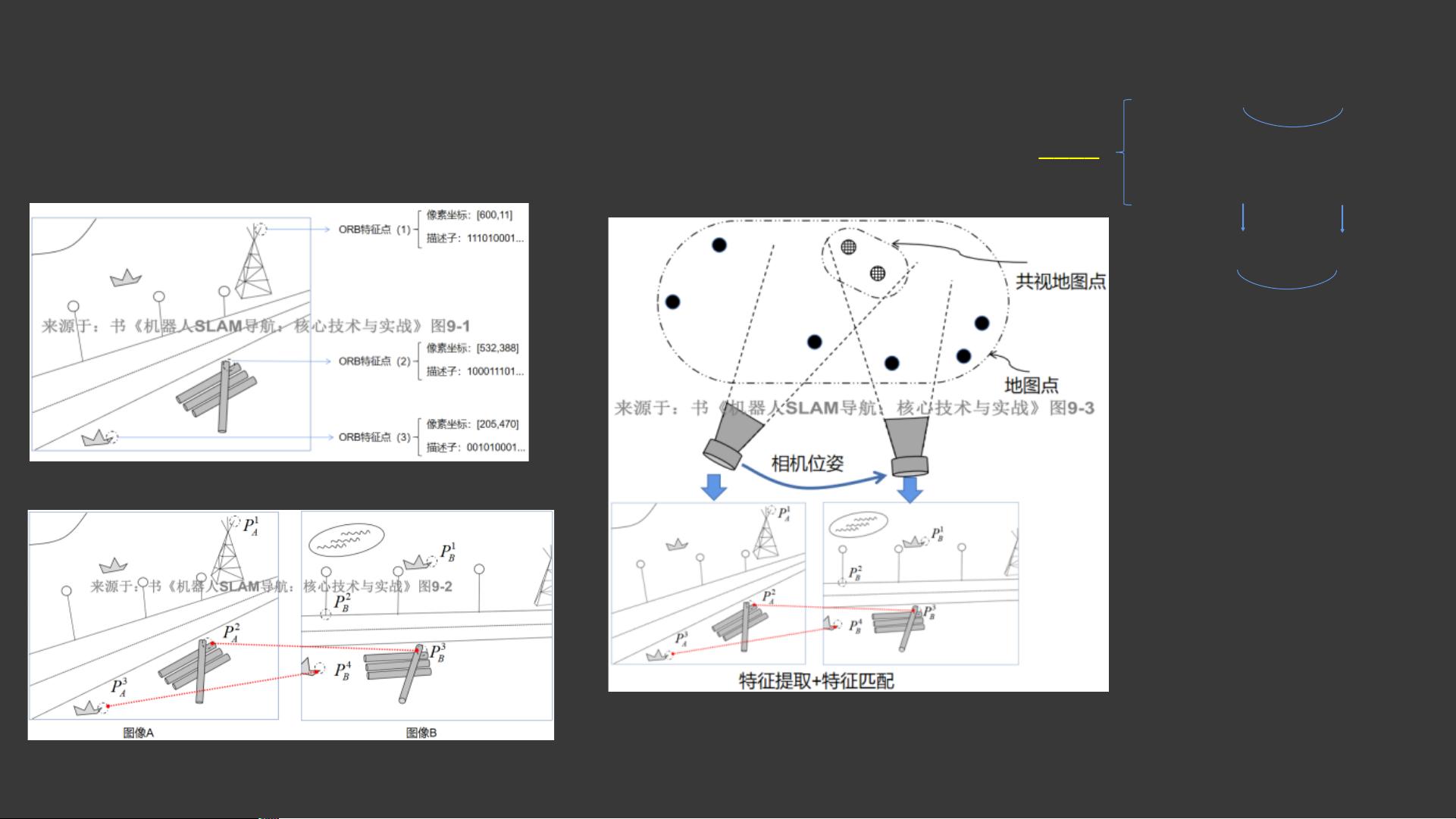
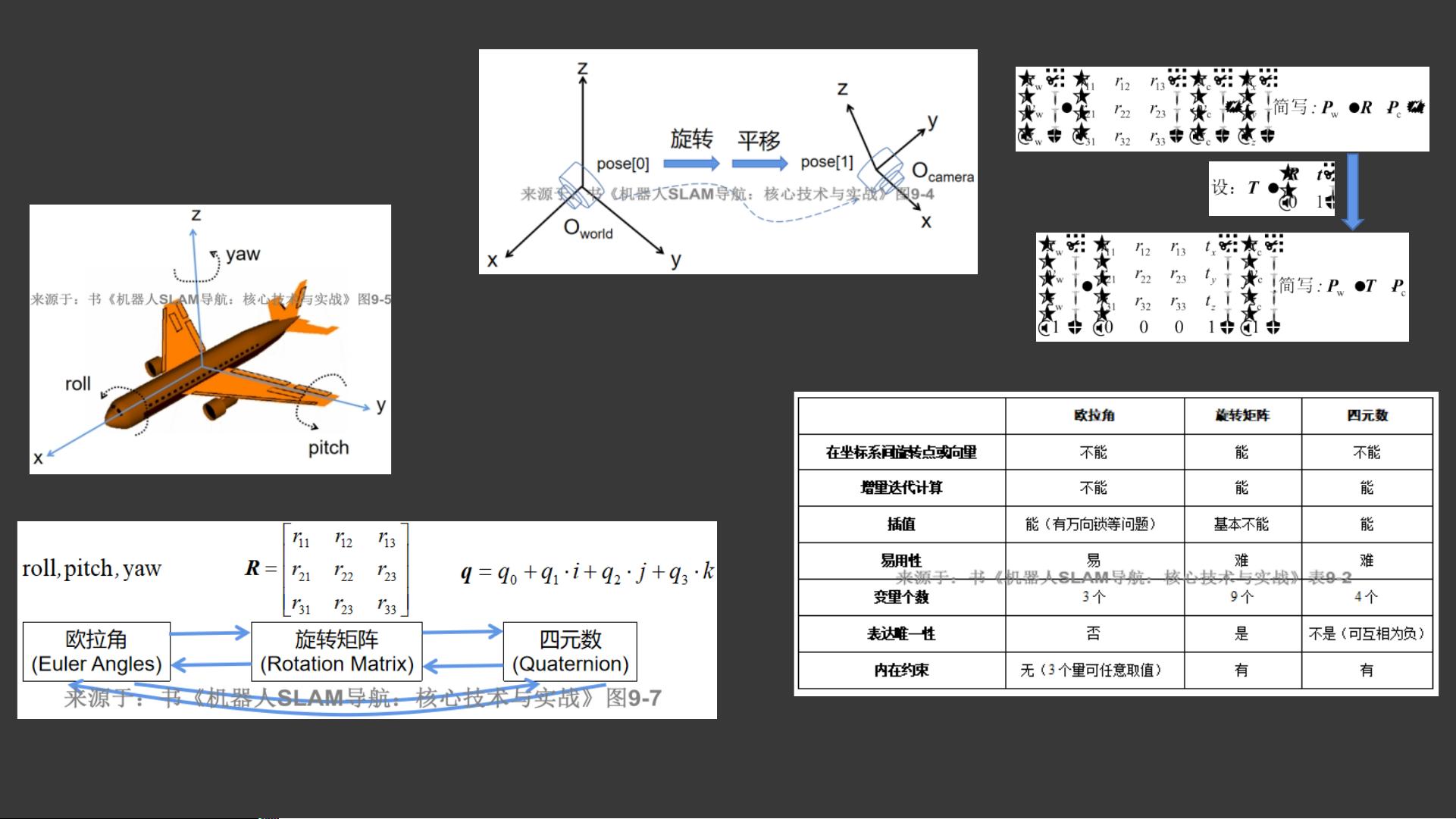
SLAM就是求解运动物体(比如机器人、无人机、相机等)的位姿和环境中路标点(也就是环境地图点)的问题。
当相机从不同的角度拍摄同一个物体时可以得到不同的图像,而这些图像中具有很多相同的信息,这就构成了共视关系
。
第9章 视觉SLAM系统
ORB-SLAM2原理分析
特征点法
直接法
:
特征点法
:
(间接法
)
像素 像素
共视关系
像素
像素
特征点 特征点
共视关系
①特征提取
②特征匹配
③多视图几何模型构建
* 关于图像特征点提取的具体过程,请看课本第3章的对应内容。
剩余30页未读,继续阅读
2023-09-03 上传
2023-03-29 上传
2021-08-19 上传
2021-07-27 上传
2021-02-22 上传
2023-10-10 上传
2024-05-15 上传

xiaoli8748_软件开发
- 粉丝: 1w+
- 资源: 1436
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
