
v
是重力方向的最大上升加速度
,g=9.8 m/s ;
a
max
t
响
v
max
——运载时工件最大上升速度;;
t
响
——系统达到最高速度的时间,一般选取 0.03~0.5s;
K ——方位系数,根据手指与工件位置不同进行选择;
3
G——被抓取工件所受重力(N)。
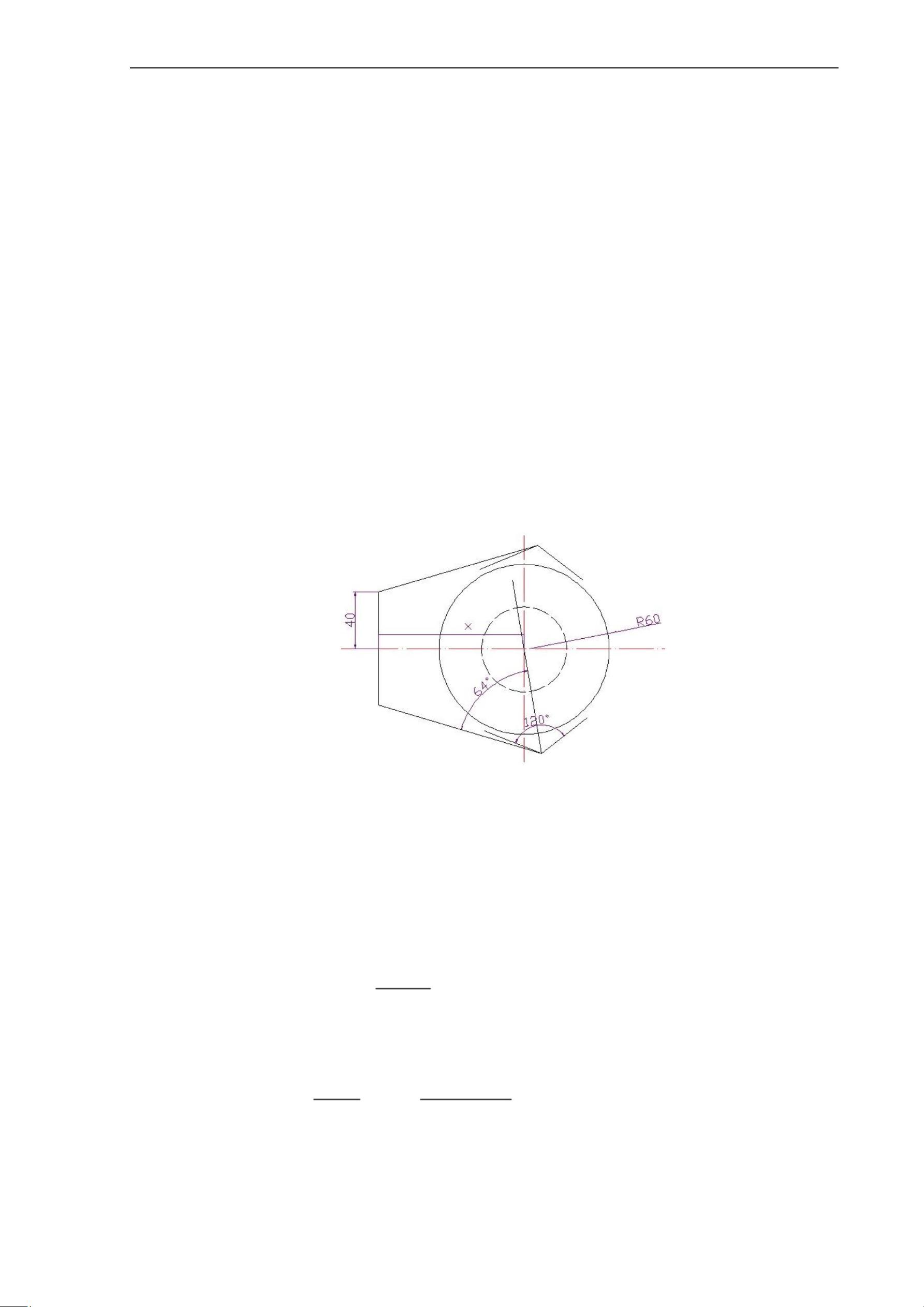
计算:设 a=40mm,b=120mm, =35°;机械手达到最高响应时间为 0.5s,求夹紧力
F 和驱动力 和 驱动液压缸的尺寸。
F
N
(1) 设 K =1.6 V =102 mm/s
t =0.5s
s
1
max
0.1
a
0.5
K 1 =
=1.02
1
g
2
9.8
K =0.5
3
根据公式,将已知条件带入:
F =1.6³1.02³0.5³300=244.8N
N
根据驱动力公式得:
2bcos
2120cos 35
2
2
(2)
F =
F =
N
244.8=986N
计算
a
40
取 0.85
F
986
(3) F
=
=1160N
计算
0.85
实际
(4) 确定液压缸的直径 D
(2-3)
F
实际
D d p
2
2
4
选取活塞杆直径 d=0.5D,选择液压缸压力油工作压力 P=39.2105Pa
4F
41160
则 D=
0.0224m
实际
(1 0.5 )
39.21050.75
p
2
根据液压缸内径系列表(JB826-66),选取液压缸内径为:D=32mm,根据装配关系,
剩余62页未读,继续阅读















