Cruise循环工况计算与仿真参数解析
需积分: 48 98 浏览量
更新于2024-09-08
1
收藏 2.82MB DOCX 举报
“Cruise计算任务涉及车辆仿真中的循环工况模拟,如NEDC、FTP72等,用于评估油耗和排放。Cruise内置多种标准路谱,并提供静态计算模式进行性能分析。”
在Cruise软件中,计算任务主要聚焦于模拟车辆在不同循环工况下的性能表现,如燃油经济性和排放量。这些工况通常是由车辆在实际道路上可能遇到的各种驾驶行为(如加速、减速、匀速和怠速)组成的,通过速度-时间曲线来描绘。Cruise内置了一些国际通用的循环工况标准,包括:
1. ECE城市循环(ECER15) - 代表欧洲城市驾驶条件的UDC(Urban Driving Cycle)。
2. Extra Urban Driving Cycle (EUDC) - 适用于非城市环境的驾驶循环。
3. MVEG (EUDC-EFZ) - 模拟ECE标准的模态工况,对应NEDC(New European Driving Cycle)。
4. 美国城市循环(FTP72 without break)和FTP75 with break - 分别代表美国的城市和更现代的FTP75测试程序,包括停车阶段。
5. 美国高速公路循环(HDC) - 模拟高速公路上的驾驶。
6. 日本10/15模式 - 日本规定的车辆油耗测试标准。
7. 印度驾驶循环(IDC) - 适应印度道路特点的驾驶循环。
在进行Cruise的循环工况计算时,混合动力车辆的 SOC(State of Charge)平衡是一个关键考虑因素。测试的有效性在于车辆在开始和结束时的电池SOC状态相同。Cruise采用“neutral”模式,从预设的初始SOC开始计算,如果最终SOC不匹配,系统会自动调整并重复循环,直至达到SOC平衡,或者最多执行用户设定的循环次数。这一过程有助于评估和优化车辆的控制策略。
此外,Cruise还提供静态计算模式(Stationary Calculation),这不考虑时间因素,主要用于分析性能特性,如最高车速、最大爬坡度和最大牵引力等。在静态计算中,每个计算步骤假设车辆处于稳定状态,加速度为零。这使得用户可以计算在特定发动机转速和挡位下的最大爬坡能力,结果通常以车速相关的形式呈现。
Cruise的计算任务和参数设置是车辆仿真中的重要环节,它提供了对各种驾驶工况下车辆性能的详尽评估,对于车辆设计和优化具有极高的价值。无论是传统燃油车还是新能源汽车,理解并熟练运用Cruise的这些功能都是至关重要的。
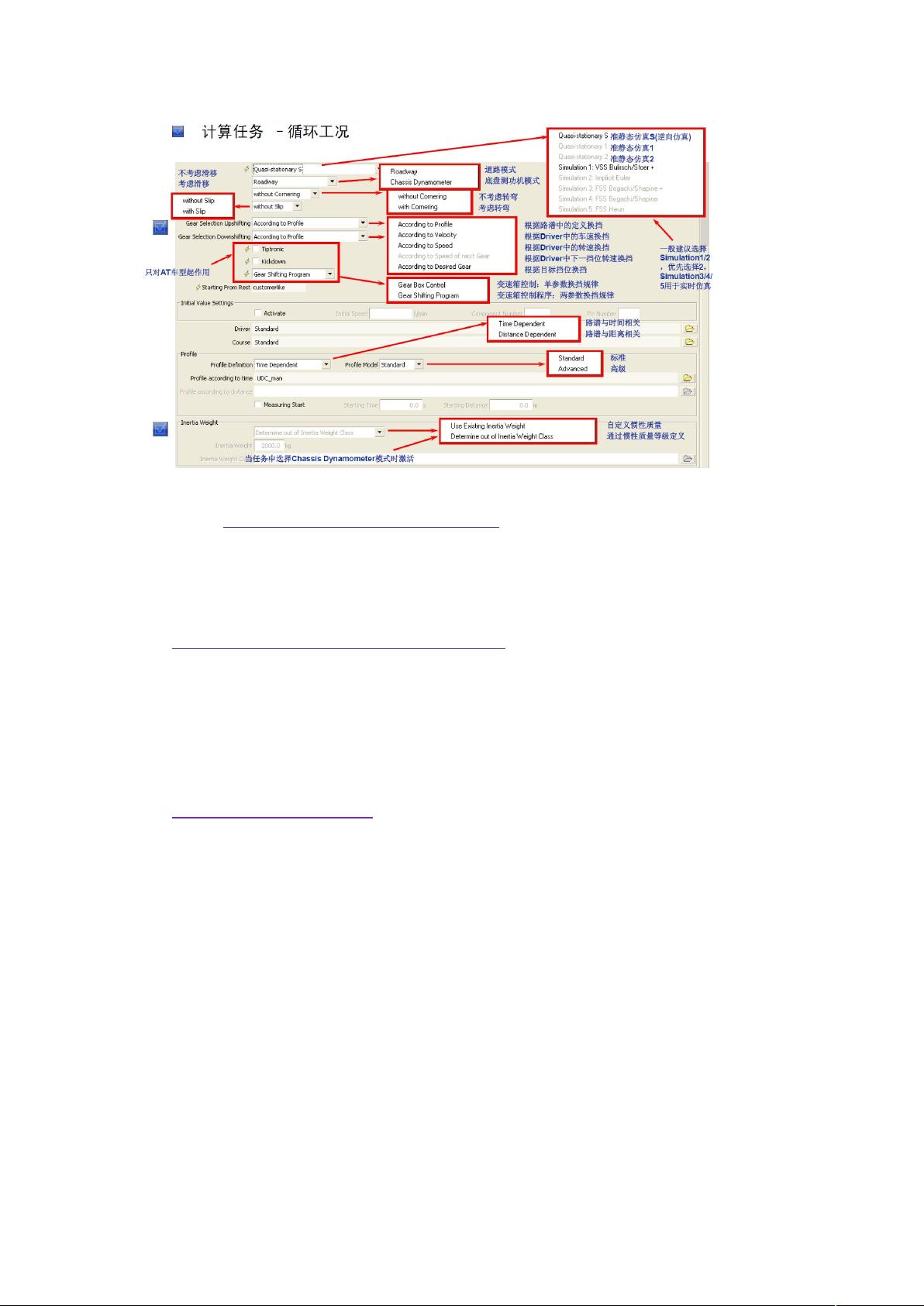
图 2
注解:①
静态计算模式(
Staonary Calculaon
)
模式用于不考虑时间影响的性能分析。一般也将其归为逆向仿真,它一般用作静态计算
(最高车速,最大爬坡度,最大牵引力等)。静态计算中,每一个步长都是稳态条件下的
计算,即对于每一个步长加速度均为零。举例来说,这样你可以计算每个发动机转速和挡
位下的最大爬坡度(结果表示为与车速的关系,其中考虑了比如轮胎滑移等影响因素)。
准静态计算模式(
Quasi-staonary Calculaon
)
该计算模式用于与时间相关的计算分析,比如循环工况计算(
Cycle Run
)等。准静态
计算模式(也可以称为“逆向工程”)中,目标值是准确定义的,需要的驱动工作点是可计
算的。 在准静态计算中,其稳态条件与静态计算模式相同。与静态计算模式相比,可以存
在加速度,但是被固定为某一定值。这样就可以计算循环工况和满负荷加速工况。车辆的
运动变量(比如,行驶循环中的车辆加速度)是预先定义好的。计算中没有控制器,计算
是非常高效的。
仿真计算模式(
Simulaon
)
与准静态计算模式相比,仿真模式更真实地模拟了模型的实际响应。对于仿真实际的
行驶循环,仿真模式采用了一个驾驶员模型来形成控制环。在这种情况下,模块之间的链
接可为刚性的,也可以是弹性的。
逆向仿真:根据车轮的扭矩(功率)需求逆向推导发动机的输出扭矩;只要该需求扭矩在发动机可提
供的范围内,逆向仿真可确保实际车速与目标车速完全一致;
正向仿真:驾驶员根据车速要求(如:CycleRun),通过调整油门踏板和制动踏板,使实际车速跟
随目标车速的过程,这个过程由于存在驾驶员的主观意识和调整过程,因此,实际车速会围绕目标车速呈
小幅波动趋势,波动的幅度与控制器的控制特性有关;
静态 Stationary,准静态 Quasi-Stationary 以及动态 Simulation,以前 NREL 开发的 ADVISOR 软件
主要就是基于 Quasi-Stationary 这种模式的,而 Simulation 对应的则是正向仿真模式,即驾驶员通过
主动操控来调整车辆的运行状态。当存在 Simulation 和 Quasi-Stationary 二选一的时候,一般建议使
用 Simulation 模 式 , 因 为 这 与 实 际 的 驾 驶 情 况 类 似 。 Quasi-Stationary 模 式 的 优 点 在 于 相 对
Simulation 模式,其计算速度要快很多,如果你认为 Quasi-Stationary 和 Simulation 两者之间的差异
在你可以接受的范围之内,那么可以考虑使用 Quasi-Stationary 模式;如果两种计算模式差异很大,以
Simulation 的计算结果为准!
剩余10页未读,继续阅读
2020-07-03 上传
2023-07-15 上传
2010-09-02 上传
2021-10-04 上传
2021-10-11 上传
2022-07-06 上传
点击了解资源详情

Heroluishin
- 粉丝: 11
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
