模型预测控制详解:发展、方法与应用
模型预测控制详细讲解是一篇深入探讨该主题的文章,它首先概述了预测控制的历史发展和其在现代控制理论中的位置。现代控制理论注重精确的数学模型和最优性能指标设计,最初的应用主要集中在航空航天等军事领域的复杂系统中,这些系统往往对控制精度有极高要求。然而,工业过程的复杂性,如多变量、高维、非线性、时变性和不确定性,使得传统的最优控制难以实现。
为解决这些问题,预测控制应运而生。它的核心在于基于模型的控制,即使模型不完全精确也能够有效工作。例如,1978年的Model Predictive Heuristic Control (MPHC) 和 Model Algorithmic Control (MAC) 是早期的重要突破,分别由Richalet和Mehra以及Cutler提出。随后,Dynamic Matrix Control (DMC) 和 Generalized Predictive Control (GPC) 也相继出现,如DMC由Cutler在1979年提出,GPC则在1987年由Clarke提出,它们强调了基于阶跃响应和时间序列模型的控制策略。
文章还列举了一些与预测控制相关的公司和产品,如IDCOM、DMC、AspenTech、SMC-IDCOM、DMCplus等,这些公司在预测控制技术的研发和实施中扮演了重要角色。预测控制的特点包括:建模相对简便,对模型的依赖性较低;采用了滚动优化策略,能在实时环境中进行局部调整,展现出良好的动态控制性能;通过简单的反馈校正机制增强系统的鲁棒性,适应各种条件下的控制需求,包括有约束条件、大纯滞后、非最小相位和非线性过程;最后,作为一种计算机优化控制算法,它简化了理论难题,并具有广泛的适用性。
模型预测控制是一种创新的控制方法,通过在实际操作中结合模型和实时数据,有效地应对工业过程中复杂的控制挑战,是现代工业自动化中的关键技术之一。
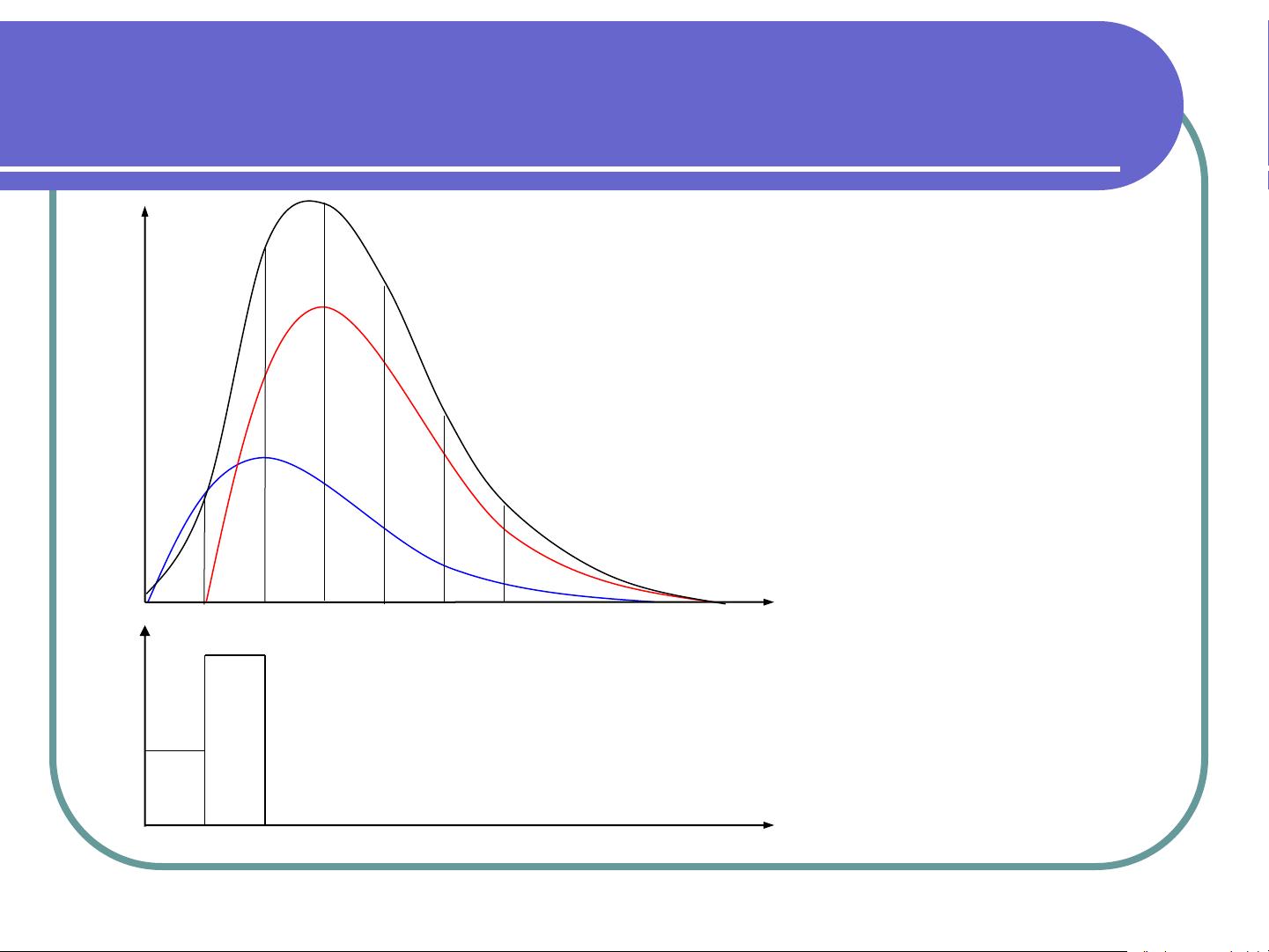
第三节 模型算法控制(MAC)
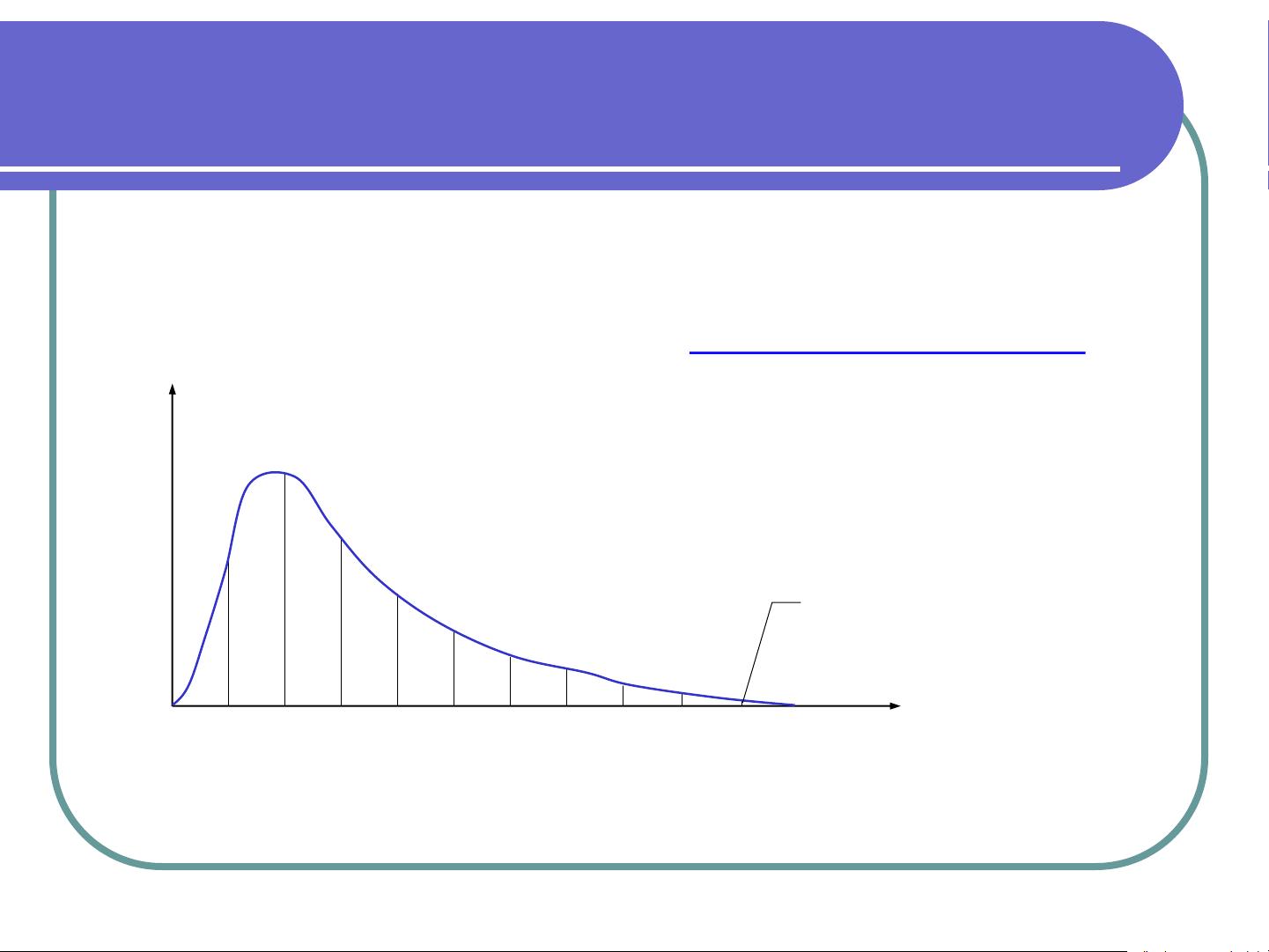
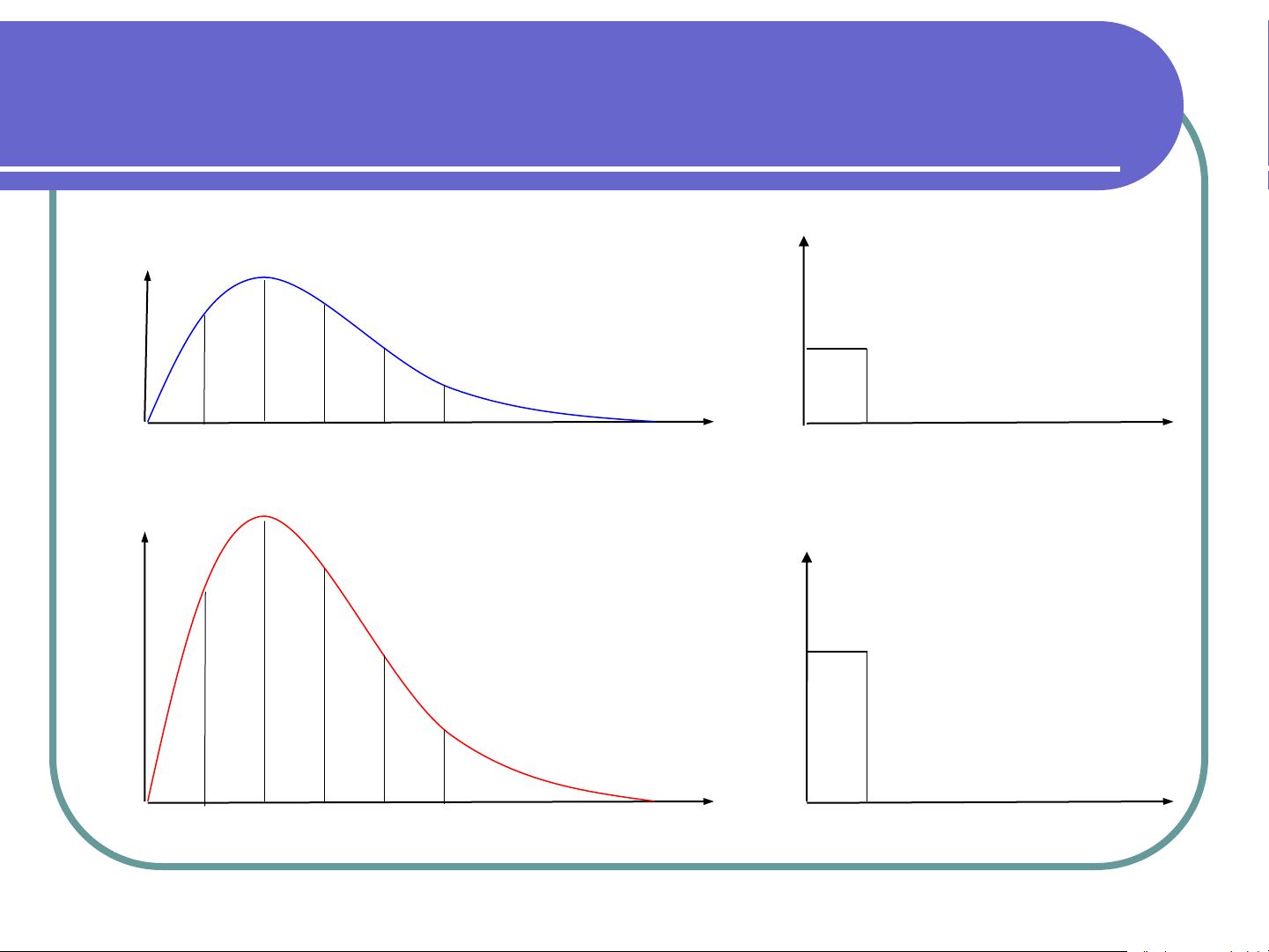
模型算法控制(Model Algorithmic Control):
基于脉冲响应模型的预测控制,又称模型预测
启发式控制(MPHC)
60年代末,Richalet等人在法国工业企业中应用
于锅炉和精馏塔的控制
主要内容
预测模型 反馈校正 参考轨迹 滚动优化
剩余100页未读,继续阅读
2020-06-11 上传
2022-07-13 上传
2022-09-21 上传
2019-03-12 上传
2021-09-29 上传
131 浏览量

IAS-01
- 粉丝: 18
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
