CAN Bus在电梯监控与控制中的应用:NUC240/140/130集成
76 浏览量
更新于2024-08-28
收藏 231KB PDF 举报
本文主要探讨了NUC240/NUC140/NUC130在电梯控制器和监测系统中的应用,结合CAN Bus(Controller Area Network,控制器区域网)技术。CAN Bus起源于20世纪80年代,由国际标准化组织ISO制定,它采用双线差动通信方式,能够在电气环境恶劣的条件下保持稳定和高效的数据传输,这使得其在复杂系统中具有显著优势。
CAN Bus的核心特点是通过两条线路传输差分信号,这种设计不仅简化了线路布局,降低了错误发生的可能性,还使得系统更加可靠。在电梯控制系统中,NUC系列产品的集成正是看中了CAN Bus的这些特性。电梯系统对实时性和可靠性要求极高,传统的继电器和串行通信难以满足需求,而CAN Bus能够实现设备间的高效通信,减少故障点,提高整体系统的响应速度和故障诊断能力。
在电梯控制器中,CAN Bus的应用可能包括监控电梯状态(如位置、速度、故障检测等)、控制电梯动作(启动、停止、换向)、以及与其他智能设备(如安全系统、维修提示系统)的交互。通过CAN Bus,这些设备能够同步工作,提高整体运营效率,并便于远程监控和维护。
CAN2.0A和CAN2.0B是CAN Bus的两个主要版本,区别在于识别子ID的长度。例如,CAN2.0A的11位ID适用于小型系统,而CAN2.0B的29位ID则提供更大的地址空间,适合更复杂的网络结构。数据封包的格式包含起始域、仲裁域、控制域、数据域、CRC域、应答域和结束域,确保数据的准确传输。
NUC240/NUC140/NUC130结合CAN Bus技术在电梯控制系统中的应用,不仅提高了系统的集成度,简化了硬件连接,而且提升了系统的稳定性和安全性,是现代电梯监控和自动化控制的重要组成部分。通过标准化的CAN Bus协议,开发人员可以轻松地扩展和集成新的功能,为电梯用户提供更好的服务体验。
NUC240/NUC140/NUC130在电梯控制器和监测的应用设计在电梯控制器和监测的应用设计
CAN Bus(Controller Area Network),控制器区域网,起源于80年代,由国际标准化组织(ISO)所发布,因
为利用双线差动(two-wired differential),使其即使在电器条件恶劣环境下,也可正常运作的一种传输总线。
又因双线沟通的特性,大幅缩减了其应用线路的使用量,也降低传统线路复杂易造成错误的发生机会。 基于以
上特性,CAN Bus一大应用层面即被导入于汽车工业,因传统的汽车使用线路复杂,使得早期汽车内部线路易
于发生故障时且较难以排除。因此双线差动讯号式CAN Bus的电器特性即被快速导入并广泛运用在各交通工具
领域(航空、轮船与汽车)或是工业
CAN Bus(Controller Area Network),控制器区域网,起源于80年代,由国际标准化组织(ISO)所发布,因为利用
双线差动(two-wired differential),使其即使在电器条件恶劣环境下,也可正常运作的一种传输总线。又因双线沟通的特
性,大幅缩减了其应用线路的使用量,也降低传统线路复杂易造成错误的发生机会。
基于以上特性,CAN Bus一大应用层面即被导入于汽车工业,因传统的汽车使用线路复杂,使得早期汽车内部线路易于
发生故障时且较难以排除。因此双线差动讯号式CAN Bus的电器特性即被快速导入并广泛运用在各交通工具领域(航空、轮
船与汽车)或是工业控制。
强健的协议与其编码格式
CAN Bus基本的协议可分为CAN2.0A与CAN2.0B两个版本,A版与B版的主要差别在于识别子(ID)长度分别为11位与
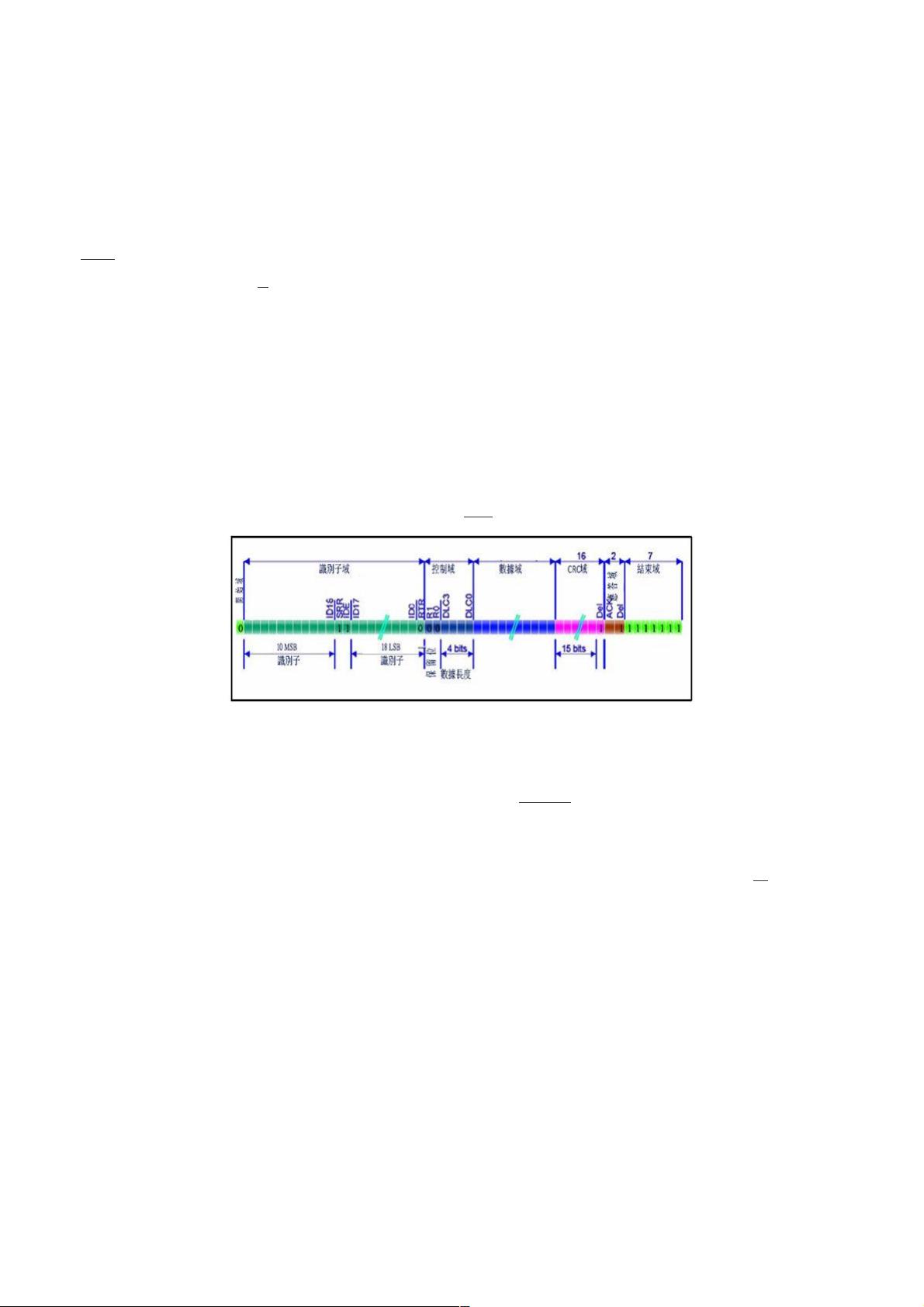
29位。如图1所示为一个CAN 2.0协议传输的数据封包(Data Frame)。
图1. CAN协议编码格式图
图1为一个CAN数据封包的格式,可分为起始域、仲裁域、控制域、数据域、CRC域、应答域和结束域。每个封包
(Frame)长可达128位,以下分别说明各域的意义,其它详细资料可参考BOSCH公司的相关CAN Bus技术文件。
●起始域(SOF, Start of Frame):该值必为0,表示封包的开始。
●仲裁域(Arbitration Field):用于确定封包的优先级,由11位或29位识别子(ID)加上一位的RTR(Remote Transfer
Request),当RTR为0时,表示传出资料;RTR为1则表示为接收资料。
●控制域(Control Field):包含两个保留位(一般为0)和表示数据域内的数据长度DLC0~DLC3共有4位。
●数据域(Data Field):0~8个Byte的被传送数据
●CRC域(CRC Field):从SOF到Data Field的CRC验证码,用于检测传输上的错误,共有15位的长度。
●应答域(ACK Field):确认对方接收是否正常,若接收成功则会回传1。
●结束域(EOF, End of Frame):表示封包的结束,为7位连续的1。
CAN Bus的特征与优点
●CAN Bus可透过简单的信息滤波设定实现点对点、一对多个点或全网络广播等资料的传输方式。
●没有特定的主从端,且可以以多个主端方式工作,因此Bus上各节点均可在任一时刻主动发送信息至其它节点。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-03-07 上传
2023-06-10 上传
2023-09-02 上传
2024-01-29 上传
2023-07-04 上传
2023-05-12 上传
2024-01-14 上传
2023-09-02 上传
2023-09-23 上传

weixin_38743119
- 粉丝: 6
- 资源: 934
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
