单目视频无监督学习深度与自我运动估计框架
PDF格式 | 1.85MB |
更新于2025-01-16
| 69 浏览量 | 举报
"本文探讨了一个无监督学习框架,该框架专注于使用单眼视频序列估计深度和自我运动。研究由加州大学伯克利分校和谷歌的研究人员共同完成,提出的方法无需任何预先标注的数据,仅依赖单目视频进行训练。该方法结合了单视图深度和多视图姿态网络,通过视图合成损失进行优化,使得网络在训练过程中相互耦合,但在测试时可以独立运行。实验结果显示,该方法在KITTI数据集上表现优秀,深度预测精度提高了10%,并且在相似的输入条件下优于传统的SLAM系统。"
文章的核心知识点包括:
1. 无监督学习:与以往依赖于标记数据的方法不同,该框架创新性地采用无监督学习,仅用未标注的单目视频就能训练模型,从而估计深度和相机运动。
2. 单视图深度和多视图姿态网络:模型由两个部分组成,一部分预测单视图深度,另一部分估计多视图的相机姿态。这两个部分在训练时共享视图合成损失,但在实际应用中可以独立运作。
3. 视图合成损失:作为监督信号,视图合成损失使网络能够通过计算的深度和姿态将相邻视图扭曲到目标视图,以此来优化网络性能。
4. 端到端学习:整个模型的训练过程是端到端的,直接从输入像素映射到相机的6-DoF变换矩阵估计和底层场景的深度图。
5. 实际应用与效果验证:在KITTI数据集上的实验表明,该方法在单目深度预测上超越了其他单目深度方法,同时在与SLAM系统的比较中也表现出优越性,证明了其在实际场景中的有效性和实用性。
6. 人类视觉启发:研究灵感来源于人类如何通过观察和移动来理解环境,通过大量的视觉经验形成对世界的结构化理解。模型试图模拟这一过程,通过预测相机运动和场景结构来解释观察到的图像序列。
7. 应用场景:这种技术有潜力应用于自动驾驶、机器人导航、增强现实等领域,帮助系统更好地理解和预测周围环境。
该研究对于推动无监督学习在计算机视觉领域的应用,尤其是在深度估计和运动估计方面,具有重要意义。通过减少对标注数据的依赖,这种方法为未来更高效、更广泛的学习模型提供了可能。
1853
S
I
t
I
t
−1
深度CNN
I
t
I
s
I
I
t
+1
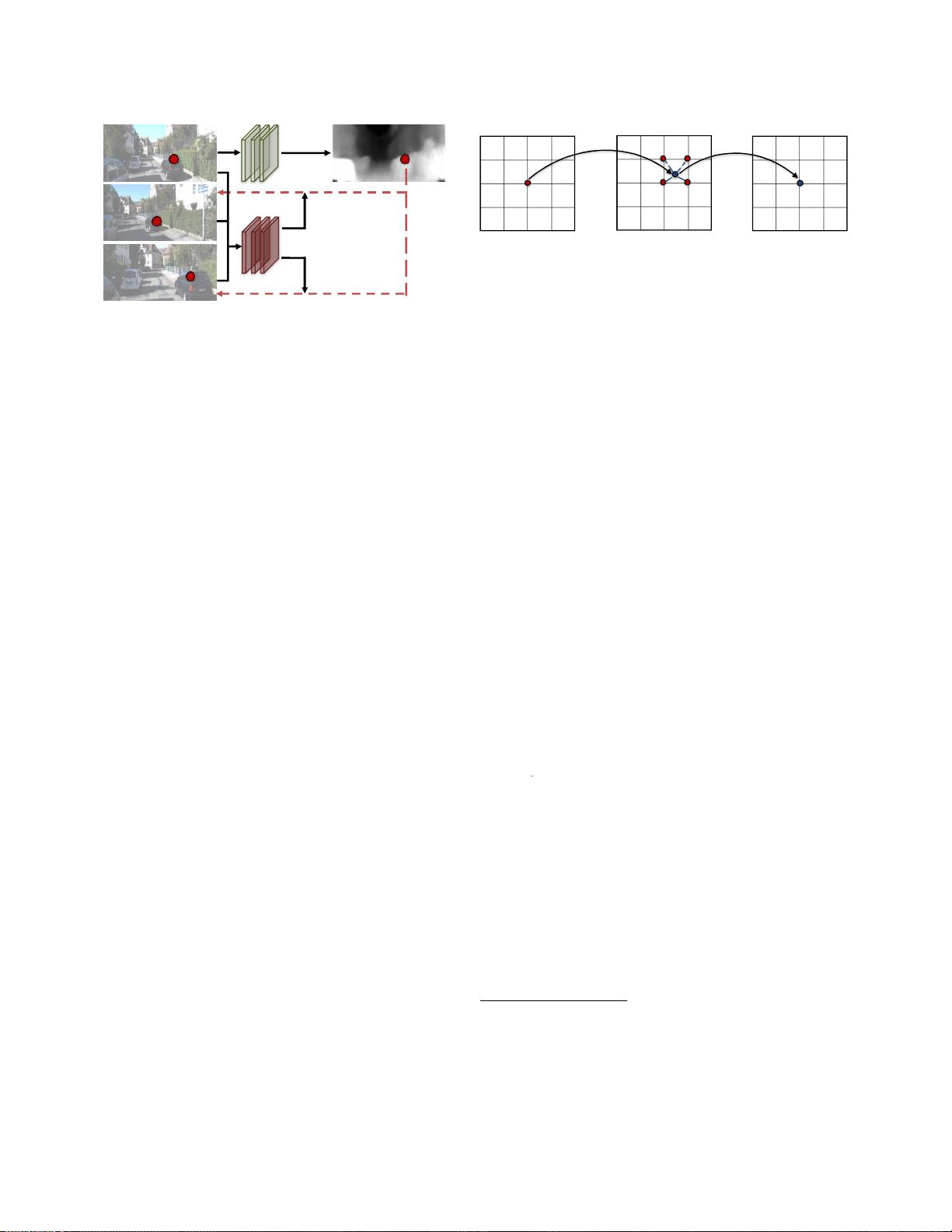
图
2.
基于视图合成的监控管道综述深度网络仅将目标视图作
为输入,并且
输出像素
x
像素的深度图
D
_
t
。姿势网络工作既需要
目标视图(
I
t
)和附近
/
源视图(例如,
I
t−1
和
I
t+1
)
作为输
入,并输出相关相机姿态(
Tt
→
t
−
1
,
T
t
→
t
+
1
)。
然后,两个网
络的输出被用于逆扭曲
源视图(参见第3.2)来重建目标视图,并且光度重建损失用
于训练CNN。通过利用视图合成作为监督,我们能够从视频
中以无监督的方式训练整个框架。
运动时,我们假设我们感兴趣的场景大多是刚性的,即,不
同帧上的场景外观变化由摄像机运动支配。
3.1.
将合成视为监督
深度和姿态预测CNN的关键监督信号来自
新视图合成
的
任务:给定场景的一个输入视图,合成从不同相机姿态看到
的场景的新图像。我们可以合成给定图像中每像素深度的目
标视图,加上附近视图中的姿态和可见性。如我们接下来将
展示的,该合成过程可以以完全可微的方式实现,其中CNN
作为几何和姿态估计模块。可见性是可以处理的
图3. 可微分图像扭曲过程的图示。
对于目标视图中的每个点
p
t
,我们首先
基于预测的深度和相机姿态将其投影到源视图
上,然后使用双线性插值来获得翘曲的值。
位置
p
t
处的图像
I
_
s
。
框架可以应用于没有姿态信息的标准视频。此外,它预测的
姿势作为学习框架的一部分。请参见图2,以了解我们用于
深度和姿态估计的学习管道的说明
3.2.
基于可微分深度图像的绘制
如Eq. 1,我们的学习框架的一个关键组成部分是一个可
微的基于深度图像的渲染器,它
通过从源视图
I s
中
来
重建目
标视图
I
t
基于预测的深度图
D
_
t
和相对姿态
T
_
t
→
s
。
令
Pt
表示目标视图中的像素的齐次坐标
,并且K表示相机
本征矩阵。我们可以通过2
得到p
t
p
s
<$
K
T
<$
t
→
s
D
<$
t
(
p
t
)
K
−
1
p
t
(
2
)
注意投影坐标
p
s
是连续值。 为了
获得
I
s
(
p
s
)
以填充
I
s
(
p
t
)
的 值
(参见图
3
),然后
我们使用可微双线性采样
机制
pro-p-p
。
在
空间
Transformer
网络
[23]中提出,该网络线性内插4像素邻
居(左上,右上,
左下角
和右下角
)近似
I
s
(
p
s
)
,即
以及非刚性和其他非建模因素,使用
I
s
(
p
t
)
=
I
s
(
p
s
)
=
i∈{t
,
b}
,
j∈{l
,
r}
w
i
j
I
s
(
p
i
j
)
,
其中
w
i
j
是
“
可扩展性
”
掩码,我们稍后讨论(第二节)。
3.3
)。
与
Ps
和
Pi
j
之间的空间接近
度成线性
让我们表示
<I
1
,
. . . .
,
IN
>
作为训练图像序列
和
吉
吉
i
,
j
w
S
=
1时。类似的策略在
[54]
中用于学习
其中一个帧
I
t
是目标视图,
源视图
I
s
(1≤
s
≤
N
,
sl=
t
)。视图合成
目标可以公式化为
Σ
Σ
L
v
s
=
|
I
t
(
p
)
−
I
s
(
p
)
|
、
(
1
)
直接在不同的视图之间弯曲,而这里的坐标-
通过能够对深度和相机姿态进行因式分解的投影几何来获得
像素扭曲的结果。
3.3.
建模模型限制
S p
请注意,当应用于单眼视频时,上述视图
其中,
pindexes
在
pixel
坐标上,并且
lxes
是源视图,
基于
基于深度图像的渲染模块[8](在第12节中描述)将其扭
曲到目标坐标系。
3.2
),取
预测
的
深度
D
λ
t
,预测的
4
×
4
相
机变换矩阵
1
并且源视图作为输入。
请注意,视图合成作为监督的想法最近也被探索用于学
习单视图深度估计[14,16]和多视图立体[10]。然而,据我
们所知,所有以前的工作都需要在训练过程中设置图像集
(在DeepStereo的情况下也需要测试),而我们的
1
在实践中,CNN估计欧拉角和3D平移向量,然后将其转换为变换
矩阵。
项目
p
tl
p
tr
经纱
S
S
p
t
p p
英国广播公
司
p
S
S
s
p
t
p
D
t
(
p
)
p
t
−1
姿势CNN
项目
不
!
t
−
1
p
t
+1
不
!
电话
+1
项目
剩余11页未读,继续阅读
相关推荐

407 浏览量


cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
