RL-GAN-Net:基于强化学习Agent控制的GAN网络实现点云形状实时补全
PDF格式 | 2.08MB |
更新于2025-01-16
| 25 浏览量 | 举报
5898
RL-GAN-Net:一种基于强化学习Agent控制的GAN网络实现点云形状
的实时补全
Muhammad
Sarmad KAIST
韩国
sarmad@kaist.ac.kr
Hyunjoo Jenny Lee
韩国
hyunjoo. kaist.ac.kr
Young Min
Kim
Jakistan
,
SNU
韩国
youngmin.kim邮件
snu.ac.kr
摘要
我们提出了
RL-GAN-Net
,其中强化学习(
RL
)代理
提供了对生成对抗网络(
GAN
)的快速和鲁棒控制我
们的框架被应用于点云形状完成,通过控制
GAN
将噪
声,部分点云数据转换为高保真的完整形状虽然
GAN
是不稳定的,难以训练,但我们通过以下方式规避了
这个问题:(
1
)在潜在空间表示上训练
GAN
,与原始
点云输入相比,该潜在空间表示的维度减少了,以及
(
2
)使用
RL
代理来找到
GAN
的正确输入,以生成最
适合不完整点云当前输入的形状的潜在空间表示。所
提出的流水线能够鲁棒地完成大面积缺失区域的点
云。据我们所知,这是第一次尝试训练
RL
代理来控制
GAN
,它有效地学习了从
GAN
的输入噪声到点云的潜
在空间的高度非线性映射
RL
代理取代了对复杂优化的
需求,从而使我们的技术实时。此外,我们证明了我
们的管道可以用来提高点云与丢失数据的分类精度
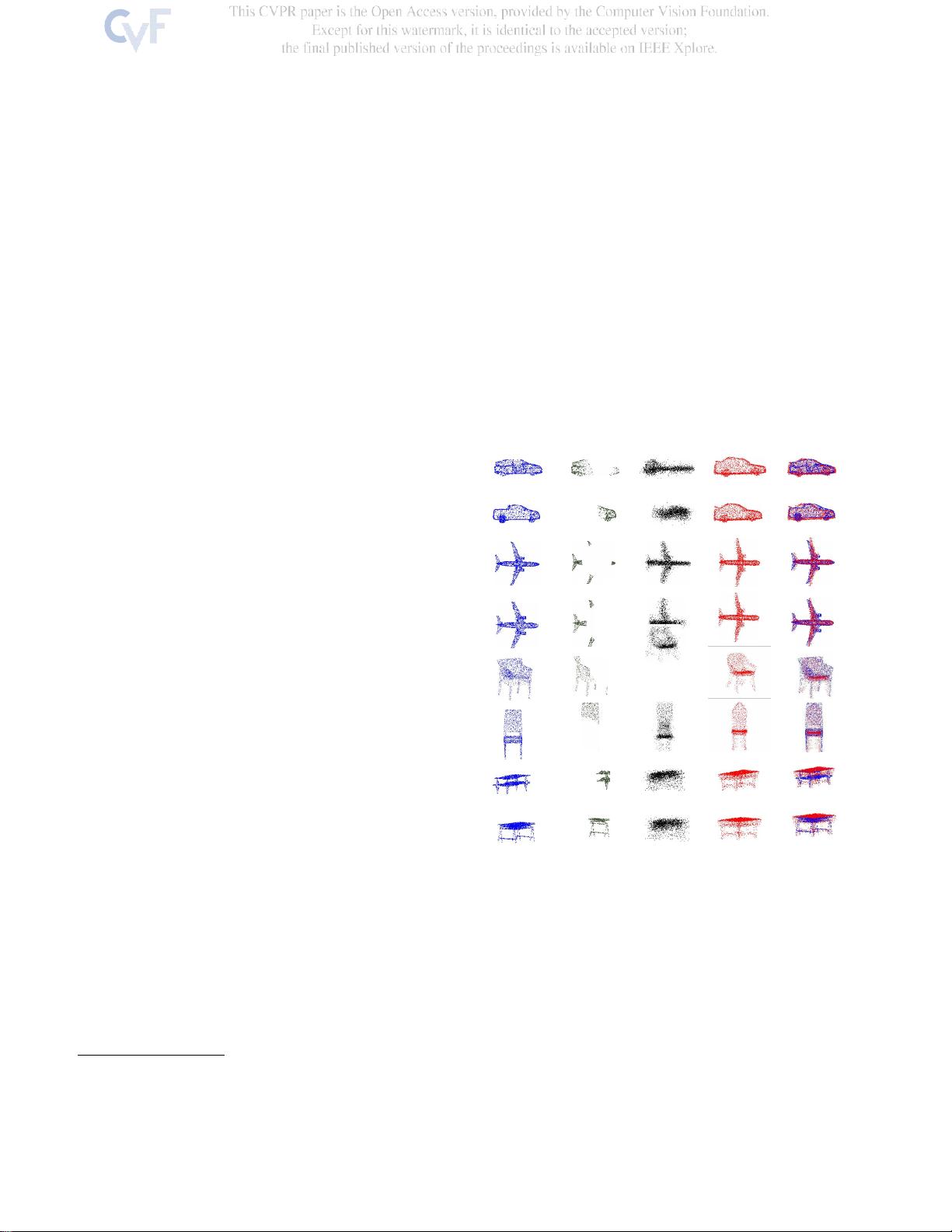
地面实况
(GT)
AE
RL-GAN-Net
中
的P
RL-GAN-Net
和GT
1.
介绍
从激光扫描仪、立体重建或RGB-D相机获取3D数据
都由于有限的视角、遮挡、传感器分辨率或无纹理区
域(立体重建)或镜面材料中的不稳定测量,原始输
出通常遭受大的缺失区域。为了利用这些测量结果,
进一步的后处理是必不可少的,包括配准、去噪、恢
复、语义理解以及最终重建3D网格模型。
在这项工作中,我们专注于填补缺失的区域
共同
通讯作者
图
1
:
给定输入数据缺失70%的原始点,点云形状完成的
定性结果。我们提出了
RL-GAN-Net
,它观察一部分输入
点云数据
(P
in
),并在几毫秒内完成形状。
即使当输入严重失真时,
与使用自动编码器(AE)的先前方法相比,我们的方法也
以高保真度完成了形状[1]。
在3D数据中通过数据驱动的方法。获取的测量值的主
要形式是非结构化和无序的3D点云因此,不可能直接
应用传统的卷积神经网络(CNN)方法,其对于结构
化数据(例如,对于像素的2D网格[20,21,5]。CNN
在3D中的扩展已被证明可以很好地与3D体素网格一起
工作[37,7,8]。然而,计算成本增长德拉斯-
下载后可阅读完整内容,剩余9页未读,立即下载
相关推荐


170 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易二维码签到系统:会议活动签到解决方案
- Ceres库与SDK集成指南:C++环境配置及测试程序
- 深入理解Servlet与JSP技术应用与源码分析
- 初学者指南:掌握VC摄像头抓图源代码实现
- Java实现头像剪裁与上传的camera.swf组件
- FileTime 2013汉化版:单文件修改文件时间的利器
- 波斯语话语项目:实现discourse-persian配置指南
- MP4视频文件数据恢复工具介绍
- 微信与支付宝支付功能封装工具类介绍
- 深入浅出HOOK编程技术与应用
- Jettison 1.0.1源码与Jar包免费下载
- JavaCSV.jar: 解析CSV文档的Java必备工具
- Django音乐网站项目开发指南
- 功能全面的FTP客户端软件FlashFXP_3.6.0.1240_SC发布
- 利用卷积神经网络在Torch 7中实现声学事件检测研究
- 精选网站设计公司官网模板推荐
