基于部分的SPAMs: 解构变形物体的形状与姿态建模
28 浏览量
更新于2025-01-16
收藏 23.24MB PDF 举报
本文主要探讨了一种新颖的3D建模方法——结构化隐式参数模型(Structured-implicit Parameter Models,简称SPAMs),该模型专注于可变形物体(如人体、面部和手部)的形状和姿态建模。SPAMs的核心理念是将非刚性物体的运动分解为结构化的部分,每个部分分别负责形状和姿态的表达,通过深度隐式函数来实现。这种设计允许对物体的运动进行结构化描述,从而在处理复杂的变形时实现全局一致性和准确性。
作者们提出了一种基于部分的空间对称分解策略,通过学习局部形状和姿态的空间,使得模型能够在测试阶段处理从未见过的变形物体的深度序列数据。这种方法的关键在于部分之间的相关性,它促进了在复杂运动序列下的部分间粗略运动对应,实现了部分空间内低维度的运动建模。这不仅提高了模型的泛化能力,还确保了在面对剧烈运动时仍能进行鲁棒的联合优化,从而实现对输入观测的准确适应和拟合。
在实际应用中,SPAMs通过部分对应关系的建立,能够有效地处理新出现的深度序列观测,即使在物体经历大幅度变形时也能保持良好的跟踪性能。实验结果表明,SPAMs在复杂可变形物体的重建和跟踪任务中展现出了领先的性能,尤其是在减少手动干预和专业领域知识需求的同时,实现了高效和精确的3D模型生成。
本文的贡献在于提出了一种创新的3D建模框架,它通过结构化隐式参数模型,有效地捕捉了可变形物体的运动规律,并在实际应用中展现了强大的适应性和鲁棒性,对于3D计算机视觉和动画领域具有重要意义。
12851
0
SPAMs:结构化隐式参数模型
0
PabloPalafox1NikolaosSarafianos2TonyTung2AngelaDai1
0
1德国慕尼黑工业大学2MetaRealityLabs研究,美国索萨利托
0
正
面
视
图
0
输入深度序列重建和跟踪
0
侧
面
视
图
0
t0
0
t1
0
t2t0t1t2
0
输入上的部分预测
0
t0
0
t1
0
t2
0
部分空间
0
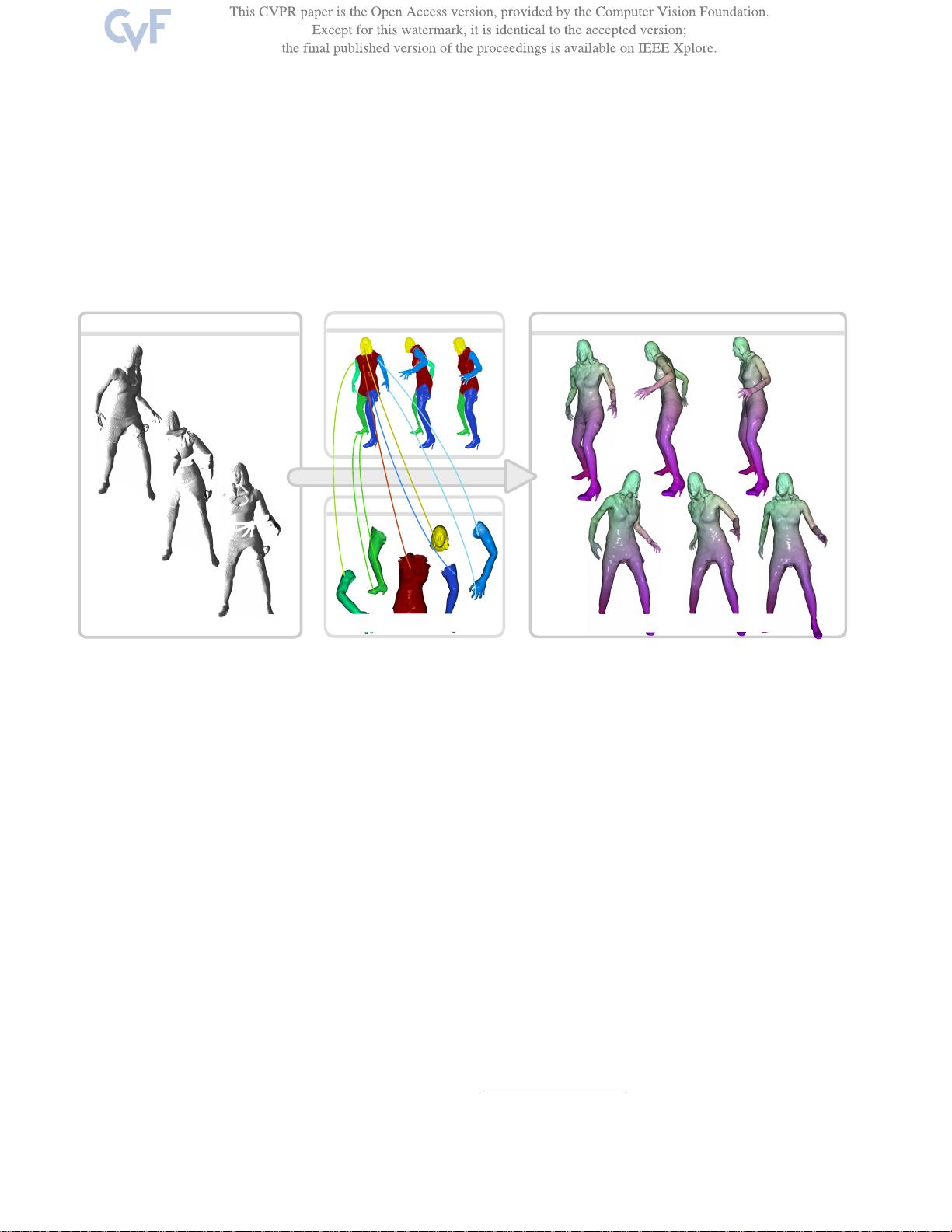
图1.
我们提出使用基于部分的解耦空间对变形形状进行结构化分解,作为结构化隐式参数模型(SPAMs)。SPAMs学习可优化的局部形状和姿态
空间,我们可以在测试时遍历这些空间以适应未见过的变形物体的深度序列观测。我们的结构化部分分解通过部分之间的相关性实现低维粗略
运动对应,从而引导在复杂运动序列下对基于部分的形状和姿态空间进行全局一致、准确的跟踪。
0
摘要
0
参数化的3D模型在建模可变形物体(如人体、面部和手部)
方面起着基础性的作用;然而,构建这样的参数化模型需要
大量的手动干预和领域专业知识。最近,神经隐式3D表示在
捕捉3D形状几何方面表现出了很强的表达能力。我们观察到
可变形物体的运动通常具有语义结构,并因此提出学习结构
化隐式参数模型(Structured-implicitPArametric
Models,SPAMs)作为一种可变形物体表示,将非刚性物
体运动结构化地分解为基于部分的解耦形状和姿态表示,每
个表示由深度隐式函数表示。这使得我们能够对物体运动进
行结构化的描述,通过部分分解对低维空间进行粗略的运动
对应建模。特别是,在测试时,我们可以利用部分分解来适
应未见过的可变形物体的深度序列观测。我们的结构化部分
分解通过部分之间的相关性实现低维粗略运动对应,从而引
导在复杂运动序列下对基于部分的形状和姿态空间进行鲁棒
的联合优化,以实现全局一致、准确的跟踪。
0
通过建立输入观测和我们学习到的部分空间之间的部分对应
关系,我们可以适应新的深度序列观测并对其进行拟合;这
通过在所有部分的形状和姿态之间进行鲁棒的联合优化来引
导,即使在剧烈运动序列下也能实现。实验证明,我们对部
分感知的形状和姿态理解在复杂可变形物体运动的重建和跟
踪方面具有最先进的性能。
0
1.引言
00
*这项工作是在MetaRL研究实习期间进行的。
下载后可阅读完整内容,剩余9页未读,立即下载
3408 浏览量
点击了解资源详情
121 浏览量
210 浏览量
3408 浏览量
164 浏览量
162 浏览量
168 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
