跨视频周期一致性: 图像表示学习的新方法,通过跨不同视频收集正样本对,提高了自监督表示学习的性能
PDF格式 | 964KB |
更新于2025-01-16
| 139 浏览量 | 举报
10149
跨视频周期一致性
麦吉尔大学,米
拉
王小龙加州大
学圣地亚哥分
校
摘要
最近的工作已经大大提高了自监督表示学习的性
能。这些方法的核心是图像内不变性学习。一个图像
实例的两个不同变换被认为是一个正样本对,其中各
种任务被设计为通过比较该对来学习不变表示。类似
地,对于视频数据,训练来自相同视频的帧的表示
比来自其他视频的帧更接近,即视频内不变性。然
而,跨视频关系几乎没有被探索的视觉表征学习。 不
像视频内不变性,跨视频关系的地面实况标签通常在
没有人工劳动的情况下不可用在本文中,我们提出了
一种新的对比学习方法,探索跨视频的关系,通过使
用一般的图像表示学习的周期一致性。这允许跨不同
的视频实例收集正样本对,我们假设这将导致更高级
别的语义。我们通过将我们的图像表示转移到多个下
游任务(包括视觉对象跟踪、图像分类和动作识别)
来验证我们的方法。我们表现出显着的改进,国家的
最 先 进 的 对 比 学 习 方 法 。 项 目 页 面 可 在
https://happywu.github.io/
cycle_contrast_video
上找到。
1.
介绍
最近对视觉表征的对比学习的兴趣激增[66,29,
3,28,57,9,26,41]。我们已经见证了对比学习在
各种视觉识别任务中使用大规模人类注释进行监督预
训练[26,9]。这种自监督任务的关键是构造同一实例
的不同视图和变换,并学习深度表示对视图变化保持
不变。为了在对比学习中构造不同的视图以形成正图
像对,最常见的方法是在同一实例上使用不同的数据
增强(
例如
:
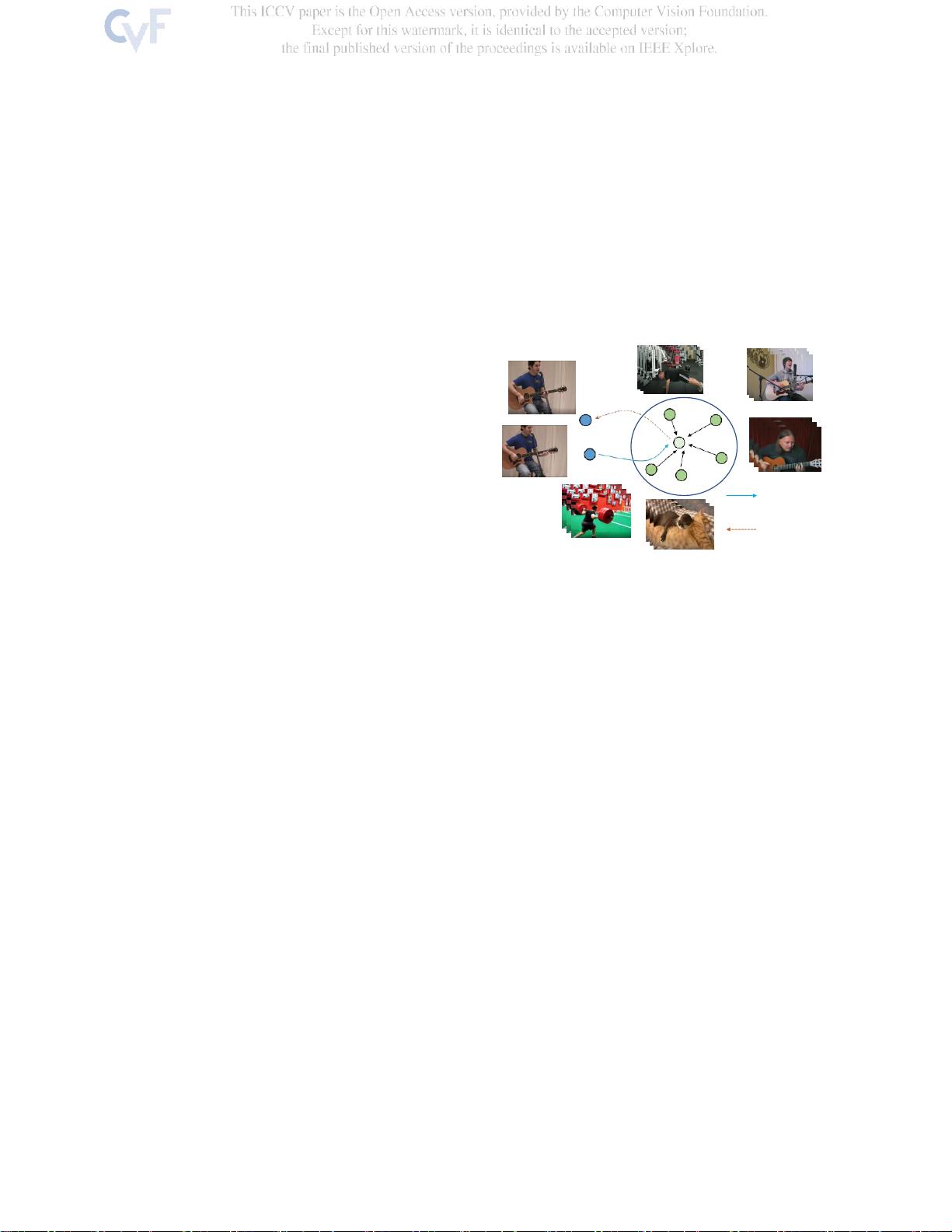
周期
一致
软最近邻
正向查找
最近邻
后向寻找最近邻
图1:图像表示学习的跨视频周期一致性。从视频中的一个
帧开始,我们从其他视频中找到它的软最近邻作为向前的步
骤,然后当软最近邻在相同视频中找到它的最近帧作为向后
的步骤中的开始帧时,实现循环一致性。
随机裁剪、图像旋转、彩色化)。
然而,简单地在单个实例上执行人工增强已经在多
个 应 用 中 显 示 出 其 局 限 性[58 , 67] 。 例 如 , Tianet
al.[58]已经对不同的增强如何影响不同的下游视觉识
别任务进行了详细的分析除了单个图像,研究人员还
研究了视频作为获得正对训练图像的来源[49,21,
61]。也就是说,同一视频中的两个附近帧可以被视为
同一对象实例的时间上的自然增强通过使用时间增强
进行训练,表示可以学习视点和变形不变性。然而,
这些方法仍然局限于在单个实例中找到正对并学习它
们的相似性。
在本文中,我们建议使用不同视频而不是同一视频
中的正图像对进行对比我们假设这可以潜在地捕获更
高级别的语义和分类信息,形成超越低级别的内部实
例不变性模型,由以前的方法。具体地,给定来自视
频的两个图像帧
I
i
和
I
j
,而不是直接将它们用作用于训
练的正对[49,21],我们将首先


剩余10页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
