3D-LaneNet:端到端3D车道检测的深度学习方法
PDF格式 | 1.26MB |
更新于2025-01-16
| 168 浏览量 | 举报
"3D-LaneNet是一个深度学习网络架构,设计用于从单张图像中直接预测3D车道的布局。该网络创新性地结合了网络内反向透视映射(IPM)和基于锚点的车道表示,解决了自动驾驶中3D车道检测的问题。3D-LaneNet的目标是在图像域中检测出车道线,并将其转换为3D空间中的曲线,从而提供准确的车道位置信息。这种方法相比传统的基于图像的检测和简单的3D投影,能更好地处理复杂的道路情况,如车道合并和分叉。
1. 网络架构与技术亮点
- 网络内反向透视映射(IPM):这是一种将常规图像视图与顶视图信息相结合的技术,它促进了不同视角间的信息流,有助于网络理解道路的几何结构。
- 基于锚点的车道表示:3D-LaneNet借鉴了目标检测中的锚点机制,每列输出代表一个车道,将车道检测问题转化为一个检测任务,减少了对聚类和离群值剔除等后处理步骤的依赖。
2. 应用场景与挑战
- 3D车道检测:对于自动驾驶汽车来说,准确估计3D车道位置至关重要,因为它直接影响车辆的路径规划和安全行驶。
- 复杂情况处理:3D-LaneNet设计考虑了实际道路上可能出现的复杂情况,如车道合并、分叉以及非平坦地面,提高了检测的鲁棒性和准确性。
3. 数据集与评估
- 3D车道数据集:为了训练和验证模型,创建了两个新的3D车道数据集,一个合成数据集和一个真实世界数据集,提供了丰富的场景变化和挑战。
- 基准测试:同时,3D-LaneNet还在传统的tuSimple车道检测基准上进行了测试,以与现有方法进行对比,展示其性能。
4. 相关技术比较
- 离线预映射与实时感知:离线解决方案依赖于预先生成的地图,而3D-LaneNet采用实时感知,无需精确的主机定位,简化了部署和维护。
- 单目深度估计:受到单目深度估计方法的启发,3D-LaneNet直接预测3D信息,避免了传统方法因假设平坦地面和固定车道宽度而导致的误差。
总结来说,3D-LaneNet是自动驾驶领域的一个重要进展,它提供了一种直接、高效的方法来处理3D车道检测问题,增强了自动驾驶车辆的环境理解和导航能力。"
2923
i
=1
i
=1
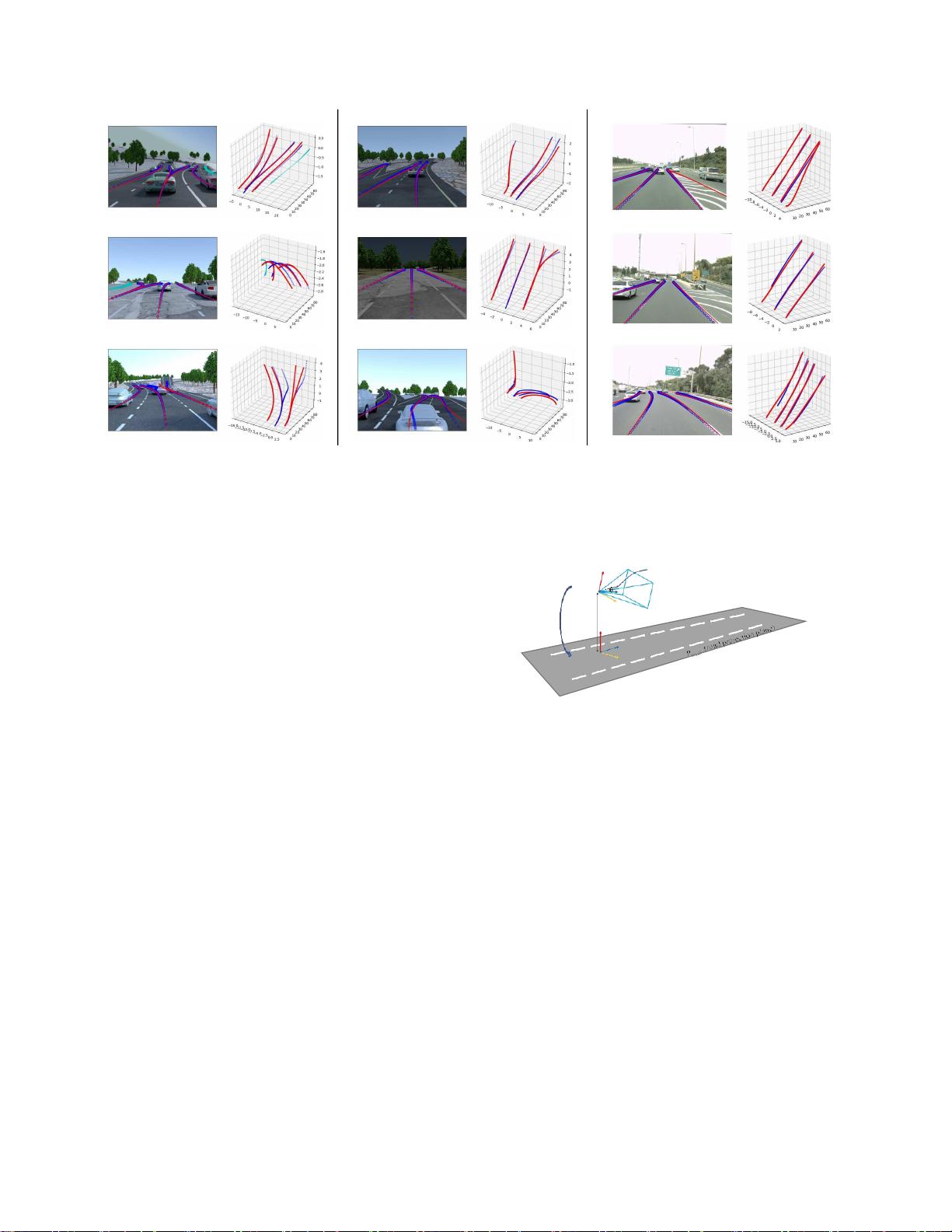
图
2.
测试图像上的结果可视化。合成
3D
通道示例的中心线检测(左列和中间列)和
3D
通道
真实图像示例的分隔符检测
(右列)。置信度
> 0
的检测
。
5
显示。地面实况
(蓝色)
和方法结果
(红色)
显示在每个图像中,旁边是
3D
可视化。请
注意,
3D
轴是场景自适应的。忽略的泳道以
青色
标记。最左下方的示例显示了无法正确分配车道拆分,可能是由遮挡引
起的
每个产生一个描述符(每个视图一个),然后将其连
接并应用于候选图像位置。Li
等人
[19]使用CNN直接
在顶视图图像上检测车道标记以及几何属性,例如局
部位置和方向,这保留了对这些属性的不变性。此
外,他们还部署了第二个循环网络,该网络遍历图像
以检测一致的车道。Neven
等人。
[25]使用子网络(与
以前的工作相比,我们利用这两种观点在一个协同的
单一网络的方法。
更一般地说,我们提出了第一种方法,该方法使用
端到端训练的CNN来直接检测多个车道并估计每个这
样的车道的3D曲率。我们还表明,我们的方法是适用
于中心线和分隔符的能力,处理分裂和合并,以及,
没有任何进一步的后处理。
3.
方法
我们的方法得到从安装在车辆上的前置摄像头拍摄
的单个图像作为输入,如图3所示。我们假设已知的固
有相机参数κ(例如,焦距、投影中心)。我们还假设
摄像机安装在
相对于局部地平面的
零度滚动处。我们
不假设已知的摄像机高度和俯仰角,因为这些可能会
由于车辆动力学而改变。道路场景中的车道可以描述
为
摄像
机间距
图
3.
摄像机位置和道路投影平面
一组车道分隔符
{
Di
}
N
D
,
如图所示。5.每个此类车道图
元(中心线或切线)都是以相机坐标(C
相机
)表示的
3D曲线。任务是检测车道中心线和/或车道界线的集合
这是给图像。
3.1.
顶视图投影
我们简 要 回顾了反向透视 映 射(IPM)。简而言
之,IPM是将前视图图像扭曲为虚拟顶视图图像的单
应性,如图1的左上图像所示。这相当于应用相机旋转
单应性(视图向下旋转),然后进行各向异性缩放
[11]。在我们的实现中,我们希望确保顶视图图像中
的每个像素对应于道路上的预定义位置,
独立
于相机
固有特性及其相对于道路的姿态。
参见图3,了解以下定义的说明
通过中心线
{
C
i
}
N
C
的
集合
每一条车道的
选项。设置摄像机摄像头
C
c
a
mer
a
=
(
x
′
,
y
′
,
z
′
)
,
剩余11页未读,继续阅读
相关推荐



cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
