3DCrowdNet:针对野外拥挤场景的3D人体网格估计
58 浏览量
更新于2025-01-16
收藏 13.77MB PDF 举报
"本文介绍了3DCrowdNet,这是一种专门针对野外拥挤场景进行3D人体网格学习和估计的方法,旨在克服现有技术在处理此类复杂环境时的局限性。"
在3D人体网格估计领域,尽管已经取得了显著的进步,但在处理野外环境中的拥挤场景时,现有方法常常遇到困难。这主要归因于两个关键问题:一是训练数据与测试数据间的域差异,运动捕捉数据集虽能提供精确的3D标签,但缺乏对拥挤情况的覆盖;二是处理特征时的平均化策略,导致目标人物的特征与背景或其他人物的特征混淆。
3DCrowdNet通过创新策略解决了这些问题。首先,它不再依赖运动捕捉数据集进行训练,从而减少了域差的影响。其次,它引入了一种基于关节的回归器,该回归器通过在目标关节位置采样特征,然后回归人体模型参数,保持了目标人物的空间激活,有效地区分了目标人物与其他人物的特征。
这一方法的核心在于,3DCrowdNet学会了以目标为中心的特征表示,能够有效地过滤掉邻近人物的无关特征。通过在多个基准测试上的定量和定性评估,3DCrowdNet证明了其在处理野外拥挤场景时的稳健性。
在实际应用中,如异常行为检测和人员重新识别,3D人体网格的准确估计至关重要,尤其是在有遮挡的拥挤环境中。3DCrowdNet的出现为解决这个问题提供了一个新的视角和解决方案。通过其公开的代码,研究者和开发者可以进一步探索和利用这种方法,提高在复杂环境下的3D人体网格估计性能。
3DCrowdNet是一项重要的学术研究成果,它不仅揭示了现有技术在处理拥挤场景时的不足,还提出了一种新的、有效的解决策略,为未来在类似领域的研究奠定了基础。通过3DCrowdNet,我们有望在现实世界的应用中看到更准确的人体网格估计,特别是在人群密集的场景下。
1475
0
学习从野外拥挤场景中估计稳健的3D人体网格
0
HongsukChoi1GyeongsikMoon1JoonKyuPark1KyoungMuLee1,2
0
1电子与计算机工程系&ASRI,2IPAI,首尔国立大学,韩国
0
{redarknight,mks0601,jkpark0825,kyoungmu}@snu.ac.kr
0
摘要
0
我们考虑从野外拥挤场景中恢复单个人的3D人体网格的问题
。虽然在3D人体网格估计方面取得了很大进展,但是现有方
法在测试输入具有拥挤场景时遇到困难。失败的第一个原因
是训练和测试数据之间存在域差异。运动捕捉数据集提供了
准确的3D标签用于训练,但缺乏拥挤数据,阻碍了网络学习
目标人物拥挤场景下的稳健图像特征。第二个原因是特征处
理,即对包含多个人的局部边界框的特征图进行空间平均。
整个特征图的平均使目标人物的特征与其他人不可区分。我
们提出了3DCrowdNet,首次明确针对野外拥挤场景,并通
过解决上述问题来估计稳健的3D人体网格。首先,我们利用
不需要运动捕捉数据集的3D人体姿态估计进行训练,不受域
差的影响。其次,我们提出了一种基于关节的回归器,可以
区分目标人物的特征和其他人。我们的基于关节的回归器通
过从目标的关节位置采样特征并回归人体模型参数来保留目
标的空间激活。因此,3DCrowdNet学习到了以目标为中心
的特征,并有效地排除了附近人物的无关特征。我们在各种
基准测试上进行实验证明了3DCrowdNet对野外拥挤场景的
稳健性,无论是定量还是定性。代码可在此处获取1。
0
1.引言
0
为了从单张图像中重建准确的3D人体网格,已经进行了大量的研究,这些网格代表了人的姿势和形状。然而
,在野外拥挤场景中,从3D人体网格估计中缺乏拥挤场景的研究,尽管这种场景很常见。因此,大多数先前
的工作在没有人与人之间遮挡的场景中展示结果,并在拥挤场景中提供不准确的结果。人与人之间的遮挡是
野外拥挤场景的主要挑战,许多实际应用,包括异常行为检测[8]和人员重新识别[35]都会遇到这种情况。本
文研究了当前文献的局限性,并提出了一种从野外拥挤场景中稳健估计3D人体网格的新方法。
0
1https://github.com/hongsukchoi/3DCrowdNet_RELEASE
00
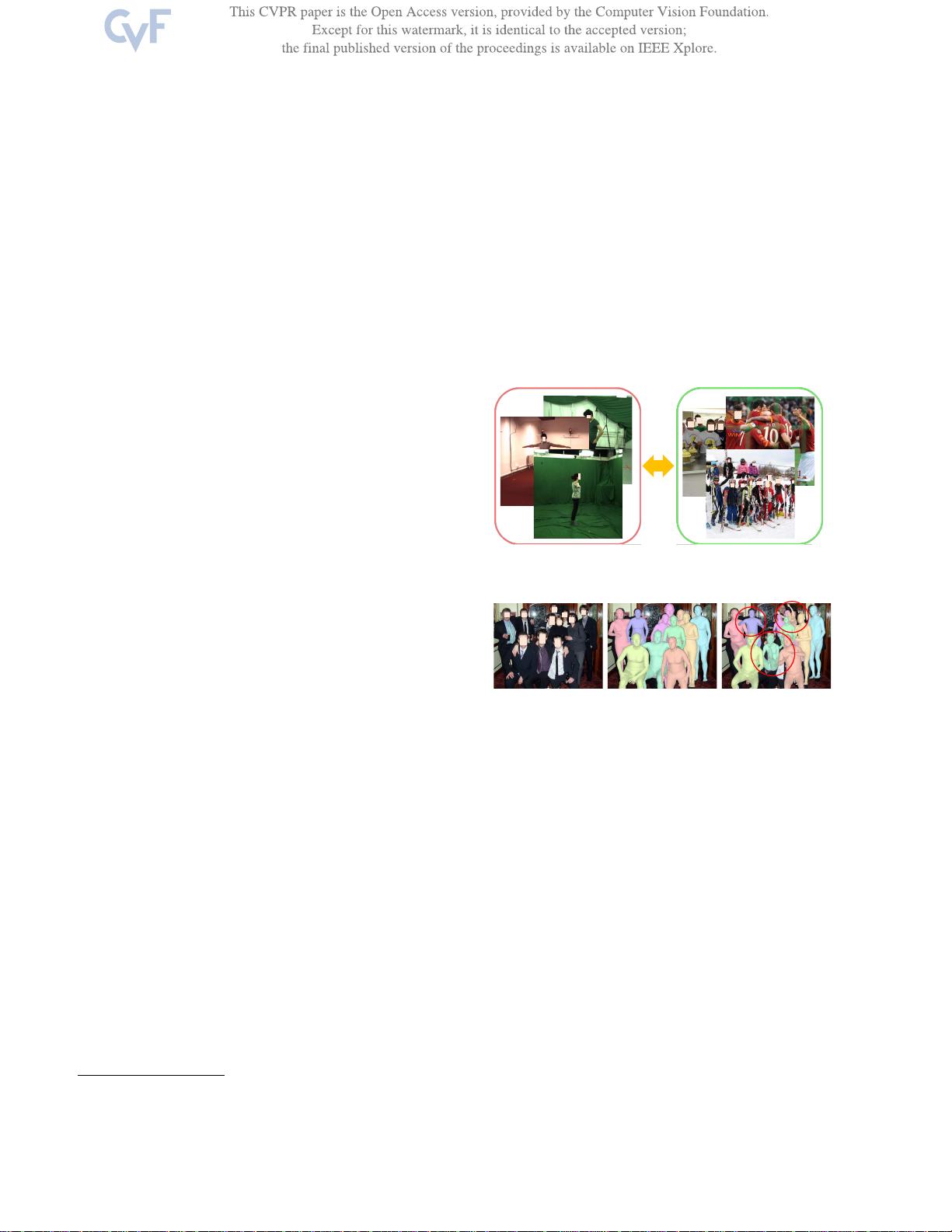
(MoCap训练数据)(野外拥挤测试数据)
0
(a)域差异(遮挡/姿势/外观等)
0
输入SOTA3DCrowdNet(我们的方法)
0
(b)定性比较
0
图1.
3DCrowdNet解决了从野外拥挤场景中估计3D人体网格的域差问题
。由于运动捕捉数据和野外拥挤数据之间存在较大的域差,现有的
最先进方法(如SPIN[19])在存在严重的人与人之间遮挡的情况下
产生不准确的结果,而3DCrowdNet则能够给出准确的3D人体网格
。为了遵守道德政策,我们在本文中对人脸进行了遮挡。
0
尽管野外拥挤场景中的人体网格估计非常常见,但几乎没有
对此进行研究。因此,大多数先前的工作在没有人与人之间
遮挡的场景中展示结果,并在拥挤场景中提供不准确的结果
。人与人之间的遮挡是野外拥挤场景的主要挑战,许多实际
应用,包括异常行为检测[8]和人员重新识别[35]都会遇到这
种情况。本文研究了当前文献的局限性,并提出了一种从野
外拥挤场景中稳健估计3D人体网格的新方法。
下载后可阅读完整内容,剩余9页未读,立即下载
2023-09-11 上传
278 浏览量
177 浏览量
2024-11-04 上传
2024-11-01 上传
2024-11-07 上传
309 浏览量
118 浏览量
2024-11-01 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
