Key.Net:融合手工与学习CNN滤波器的关键点检测
191 浏览量
更新于2025-01-16
收藏 1.51MB PDF 举报
"本文介绍了一种名为Key.Net的新方法,该方法将手工制作和学习的CNN滤波器结合在浅多尺度架构中,用于关键点检测。这种方法利用手工制作的过滤器为学习过滤器提供基础结构,以检测、评分和表示可重复特征,特别是在尺度空间中的表示。Key.Net模型经过ImageNet数据集训练,并在HPatches基准上进行了评估,显示出在可重复性和匹配性能方面的优势,同时保持较低的复杂性。文章指出,虽然CNN在减少局部描述符匹配错误方面表现出色,但在关键点检测领域的学习方法尚未完全超越手工方法。随着增强现实技术的发展,对高效可靠的局部特征检测器的需求增加,Key.Net为此提供了新的解决方案。"
在关键点检测任务中,Key.Net模型采用了一个结合了手工制作和学习的CNN过滤器的策略。手工制作的过滤器用于初始化网络,并专注于捕获可重复的局部特征,这些特征在不同的尺度上是稳定的。这些特征对于图像匹配、目标识别等应用至关重要。通过使用多尺度架构,Key.Net能够处理不同大小的对象和场景,这是图像处理中的常见挑战。
学习过滤器则在手工制作过滤器的基础上进一步优化,它们通过对特征图进行上采样和关联,组合缩放空间体积,生成最终的关键点响应图。这种方法的优点在于,它不仅减少了手动设计滤波器的局限性,还利用了深度学习的强大学习能力,以适应各种复杂的图像条件。
损失函数的设计是Key.Net的核心部分,它旨在检测具有高鲁棒性的特征并最大化可重复性得分。这意味着Key.Net能够检测到在不同图像或变换条件下仍然可识别的关键点,这对于鲁棒的图像匹配至关重要。
实验结果显示,Key.Net在HPatches基准测试中表现优于现有的检测器,尤其是在可重复性指标上。这表明,结合手工制作和学习的CNN滤波器的方法可以有效地提升关键点检测的性能,而不会显著增加计算复杂性。
Key.Net提出了一种创新的混合方法,将传统的工程滤波器与深度学习相结合,为局部特征检测带来了新的视角。随着计算能力的提升和学习算法的进步,这种结合人工和自动的方法可能预示着未来关键点检测和图像分析领域的一个新趋势。
5836
Key.Net:通过手工制作和学习的CNN过滤器进行关键点检测
Axel Barroso-Laguna
1
Edgar Riba
2
,
3
Daniel Ponsa
2
Krystian
Mikolajczyk
1
1
Imperial College London
2
Computer Vision Center
3
Arraiy,Inc.
{axel.barroso17
,
k.mikolajczyk} @ imperial.ac.uk{ eriba
,
daniel} @ cvc.uab.es
摘要
我们介绍了一种用于关键点检测任务的新方法,该
方法将手工制作和学习的
CNN
滤波器结合在浅多尺度
架构中。手工制作的过滤器为学习过滤器提供锚定结
构,其对可重复特征进行本地化、评分和尺度空间表
示在网络中用于提取不同级别的关键点。我们设计了
一个损失函数来检测存在于一系列尺度上的鲁棒特
征,并最大化可重复性得分。我们的
Key.Net
模型在
ImageNet
综合创建的数据上进行训练,并在
HPatches
基准上进行评估结果表明,我们的方法在可重复性方
面优于现有技术的检测器
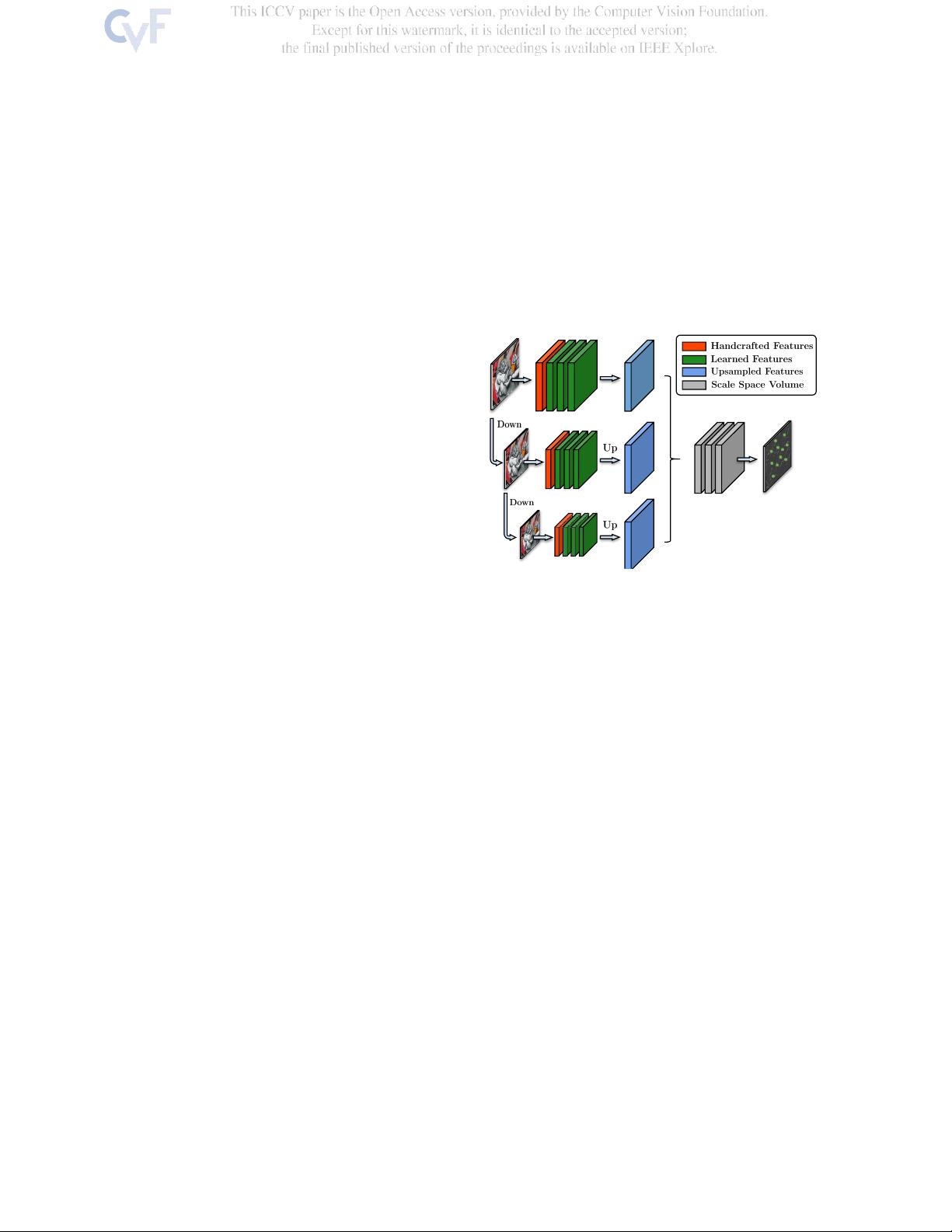
图1:
H
建议的Key.Net架构结合了
匹配性能和复杂性。
1.
介绍
局部特征检测器和描述器的研究进展在图像匹配、
目标识别、自主导航或三维重建等领域取得了显著的
进步。虽然图像匹配方法的总体方向是向基于学习的
系统发展,但在关键点检测中,学习方法相对于手工
方法的优势尚未得到明确证明[1]。特别是,卷积神经
网络(CNN)能够显着减少局部描述符中的匹配错误
[2],尽管初始技术[3,4]的效率不高。这些工作刺激
了进一步的研究工作,并导致基于CNN的描述符的效
率提高,相反,在学习检测器的有限成功之上,总体
趋势是密集而不是稀疏表示,并且将局部特征检测器
放在一边。然而,增强现实(AR)耳机以及AR智能
手机应用的日益流行已经引起了对可靠且高效的局部
特征检测器的更多关注,所述局部特征检测器可以用
于表面估计、稀疏3D重建、3D模型获取或对象对准
等。
传统上,局部特征检测器基于工程滤波器。例如,
差异化
手工制作和学习的过滤器,以提取不同尺度级别的特
征。对特征图进行上采样和关联。最后学习的过滤器
组合缩放空间体积以获得最终响应图。
Gaussians [5],Harris-Laplace或Hessian-Affine [6]使用
图像导数的组合来计算特征图,这与训练的CNN层中
的操作非常相似直观地说,只需几层,网络就可以通
过学习卷积滤波器中的适当值来模仿传统检测器的行
为。然而,与基于CNN的局部图像描述符的成功不
同,最近提出的完全基于CNN的方法[7,8,9,10,
11]所提供的手工检测器的改进在广泛接受的度量(例
如可重复性)方面受到限制。原因之一是它们在估计
特征区域的仿射参数时的低精度。对尺度变化的鲁棒
性似乎特别成问题,而其他参数(如主导方向)可以
通过CNN很好地回归[12,7]。这激励了我们的新架
构,称为Key.Net,它利用手工制作和学习的过滤器以
及多尺度表示。Key.Net体系结构如图1所示。引入作
为软锚的手工制作的滤波器,使得可以减少由最先进
的检测器使用的参数的数量,同时保持每个检测器的
性能。
W
M
起
3
米
下载后可阅读完整内容,剩余9页未读,立即下载
3202 浏览量
737 浏览量
366 浏览量
182 浏览量
183 浏览量
154 浏览量
2023-03-28 上传
314 浏览量
229 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
